95% reprappable repraps
Posted by VDX
|
95% reprappable repraps February 23, 2010 04:01PM |
Admin Registered: 16 years ago Posts: 13,891 |
... what's with designing a monolithic machine out from elastic resins activated by pressure and valves?
We had some ideas in the thread "Artificial muscles" regarding this area, but then it fall asleep ...
When solving the software/controlling-issues, this should be a >90%-reprappable 'morphing' machine where all needed 'vitamins' are the electronics, an oszillating pressure-pump and a valve-array ... the frame and moving parts will be a monolithic (or combined from three identical parts) elastic structure with embedded capillaries controlled and moved only by applying pressure to specific regions bending the frame ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
We had some ideas in the thread "Artificial muscles" regarding this area, but then it fall asleep ...
When solving the software/controlling-issues, this should be a >90%-reprappable 'morphing' machine where all needed 'vitamins' are the electronics, an oszillating pressure-pump and a valve-array ... the frame and moving parts will be a monolithic (or combined from three identical parts) elastic structure with embedded capillaries controlled and moved only by applying pressure to specific regions bending the frame ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: 95% reprappable repraps February 23, 2010 06:30PM |
Admin Registered: 17 years ago Posts: 1,791 |
JohnnyCooper is working on:
[objects.reprap.org]
Monolithic+elastic sounds elegant, but dozens of rigid (modular) parts is much easier to get into for beginners.
I think Cyberdyne_T-1 is a necessary waypoint for what you're proposing, Viktor.
-Sebastien, RepRap.org library gnome.
Remember, you're all RepRap developers (once you've joined the super-secret developer mailing list), and the wiki, RepRap.org, [reprap.org] is for everyone and everything!
[objects.reprap.org]
Monolithic+elastic sounds elegant, but dozens of rigid (modular) parts is much easier to get into for beginners.
I think Cyberdyne_T-1 is a necessary waypoint for what you're proposing, Viktor.
-Sebastien, RepRap.org library gnome.
Remember, you're all RepRap developers (once you've joined the super-secret developer mailing list), and the wiki, RepRap.org, [reprap.org] is for everyone and everything!
|
Re: 95% reprappable repraps February 24, 2010 03:30AM |
Admin Registered: 16 years ago Posts: 13,891 |
Hi Sebastien,
... all systems with 'artificial muscles' i know, used many separated tubes with elastic bulbs as actuators and were so something complicate to assemble and adjust
I think with designing and printing a single cylindrical body - embedding until some ten capilaries+cavities with a normed array-entry for easy plugging on a valve-array - this should be really easy to reprap (only a circle with some holes per slice) and assemble (glue the bottom-sides with the entries onto a valve-array and the tops to the tool-head).
Then you can assemble three or four of the morphing structures to a frame which moves the toolhead around by bending th earms - this will result in an extreme low-count of parts: - a Base for the valve-arrays, 3(4) elastic arms, tool-head, oszillating pump, valves, electronics ... no bearings or other mechanical parts
What's needed more is the positioning-feedback (could be done with a separate set of cavities in the elastic arms and connected pressure-sensors in the base too) and the non-cartesian controlling algorhytms ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
... all systems with 'artificial muscles' i know, used many separated tubes with elastic bulbs as actuators and were so something complicate to assemble and adjust
I think with designing and printing a single cylindrical body - embedding until some ten capilaries+cavities with a normed array-entry for easy plugging on a valve-array - this should be really easy to reprap (only a circle with some holes per slice) and assemble (glue the bottom-sides with the entries onto a valve-array and the tops to the tool-head).
Then you can assemble three or four of the morphing structures to a frame which moves the toolhead around by bending th earms - this will result in an extreme low-count of parts: - a Base for the valve-arrays, 3(4) elastic arms, tool-head, oszillating pump, valves, electronics ... no bearings or other mechanical parts
What's needed more is the positioning-feedback (could be done with a separate set of cavities in the elastic arms and connected pressure-sensors in the base too) and the non-cartesian controlling algorhytms ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: 95% reprappable repraps February 25, 2010 04:15AM |
Admin Registered: 16 years ago Posts: 13,891 |
... here are some videos, showing what's possible with a single 'tentaculus' made from assembled tubes
Now imagine, you can print a complete 'polyhydra' with a morphing body and some tentacular fingers as one elastic piece out from silcone, stick the base to a valve-array and let it move and grab/grasp around
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Now imagine, you can print a complete 'polyhydra' with a morphing body and some tentacular fingers as one elastic piece out from silcone, stick the base to a valve-array and let it move and grab/grasp around
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: 95% reprappable repraps February 25, 2010 04:33PM |
Registered: 15 years ago Posts: 88 |
|
Re: 95% reprappable repraps February 25, 2010 05:11PM |
Admin Registered: 16 years ago Posts: 13,891 |
... right, but it was the nearest hit for morphing tentacles i found ...
Some years ago i was in contact with two groups in Germany at TU-Ilmenau and FZK-Karlsruhe which designed pneumatic and hydraulic monolithic roboters with snake-like shape and with many tubes and capilaries through the body capable of complex morphing and sensing with special cavities.
My idea is something resembling the inner structure of a squid or polyp capable of grasping like a hand with fingers, or a frame of three or four identical arms which can bend, twist and morph with some sensing apparatus for measuring the actual position of the toolhead ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Some years ago i was in contact with two groups in Germany at TU-Ilmenau and FZK-Karlsruhe which designed pneumatic and hydraulic monolithic roboters with snake-like shape and with many tubes and capilaries through the body capable of complex morphing and sensing with special cavities.
My idea is something resembling the inner structure of a squid or polyp capable of grasping like a hand with fingers, or a frame of three or four identical arms which can bend, twist and morph with some sensing apparatus for measuring the actual position of the toolhead ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: 95% reprappable repraps February 25, 2010 07:40PM |
Registered: 16 years ago Posts: 174 |
Here's another cool bendy pneumatic actuator:
[www.act.sys.okayama-u.ac.jp]
And a way for sensing how far a pneumatic muscle has contracted:
[www.act.sys.okayama-u.ac.jp]
One might use quantum tunneling composite(metal particles in an elastomer) to do the contraction sensing:
[www.peratech.com]
That tentacle setup looks like it would be ridiculously hard to control, not only would the inverse kinematics be hard, but things would start to get pretty interesting when you move at higher speeds and inertial loading starts to come into play.
I'm not so sure the tentacle setup would be accurate enough, perhaps something like a parallel kinematic setup using flexure joints might work better.
How would we make the elastomer-stiff resin parts monolithic?
Also, stress relaxation of the elastomer is going to limit the lifetime of parts with elastic elements. If the parts are monolithic, they're going to be hard to replace. It's not a problem if they can last long enough to make more of themselves.
If we wanted to get above 95% reprappability we might consider going with a 5fluidic control system, if we could live with it being slow. I've heard valve arrays are fairly expensive so it might be worth it to do this. Though the 95% reprappability might make up for the cost of the valve array.
[www.act.sys.okayama-u.ac.jp]
And a way for sensing how far a pneumatic muscle has contracted:
[www.act.sys.okayama-u.ac.jp]
One might use quantum tunneling composite(metal particles in an elastomer) to do the contraction sensing:
[www.peratech.com]
That tentacle setup looks like it would be ridiculously hard to control, not only would the inverse kinematics be hard, but things would start to get pretty interesting when you move at higher speeds and inertial loading starts to come into play.
I'm not so sure the tentacle setup would be accurate enough, perhaps something like a parallel kinematic setup using flexure joints might work better.
How would we make the elastomer-stiff resin parts monolithic?
Also, stress relaxation of the elastomer is going to limit the lifetime of parts with elastic elements. If the parts are monolithic, they're going to be hard to replace. It's not a problem if they can last long enough to make more of themselves.
If we wanted to get above 95% reprappability we might consider going with a 5fluidic control system, if we could live with it being slow. I've heard valve arrays are fairly expensive so it might be worth it to do this. Though the 95% reprappability might make up for the cost of the valve array.
|
Re: 95% reprappable repraps February 26, 2010 03:18AM |
Admin Registered: 16 years ago Posts: 13,891 |
... we had in past some threads regarding reprapping valves ...
My interests are more directed to DIY-microtech and i've already brainstormed and built some fluidic (mostly acting with FerroFluids or MRF's) systems and valves for small-size-actuators.
The best structure i had was a grid of conic holes in a plate and voicecoil-solenoids with a moving needle for every hole (resembling oldstyle needle-printer-solenoids) - so with applying oszillating pressure- and suction to all valves simultanously but opening the valves only if the right pressure- or vacuum-phase is present, you can control a big amount of cavities with individual pressure-levels with only one oszillating pump ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
My interests are more directed to DIY-microtech and i've already brainstormed and built some fluidic (mostly acting with FerroFluids or MRF's) systems and valves for small-size-actuators.
The best structure i had was a grid of conic holes in a plate and voicecoil-solenoids with a moving needle for every hole (resembling oldstyle needle-printer-solenoids) - so with applying oszillating pressure- and suction to all valves simultanously but opening the valves only if the right pressure- or vacuum-phase is present, you can control a big amount of cavities with individual pressure-levels with only one oszillating pump ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: 95% reprappable repraps May 01, 2010 04:28PM |
Admin Registered: 16 years ago Posts: 13,891 |
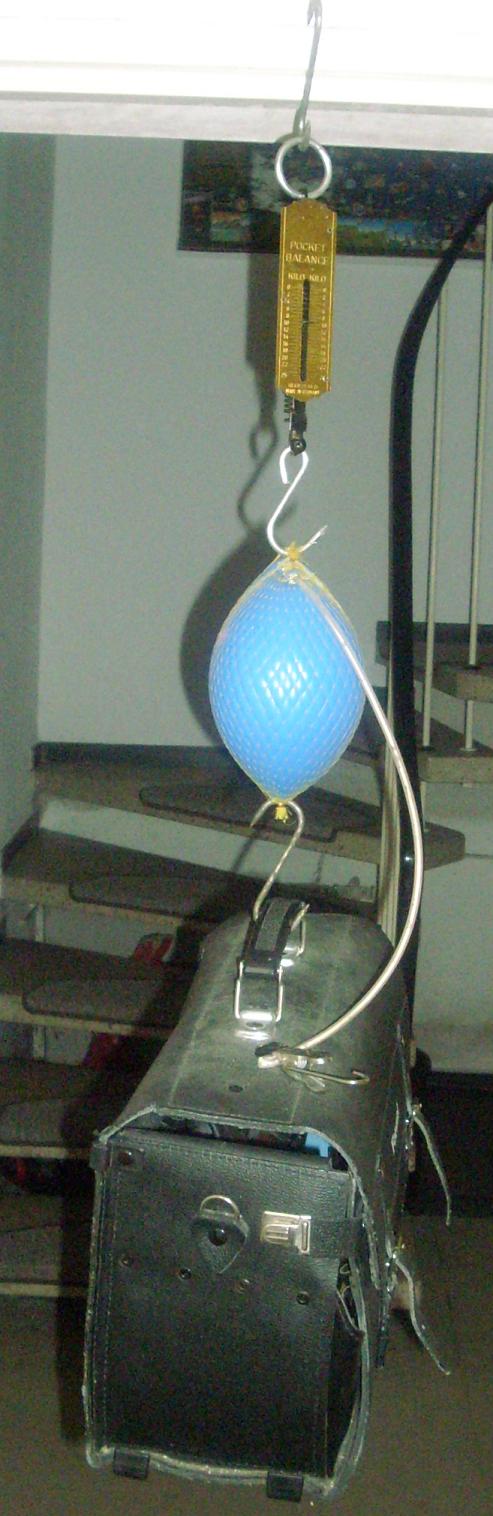
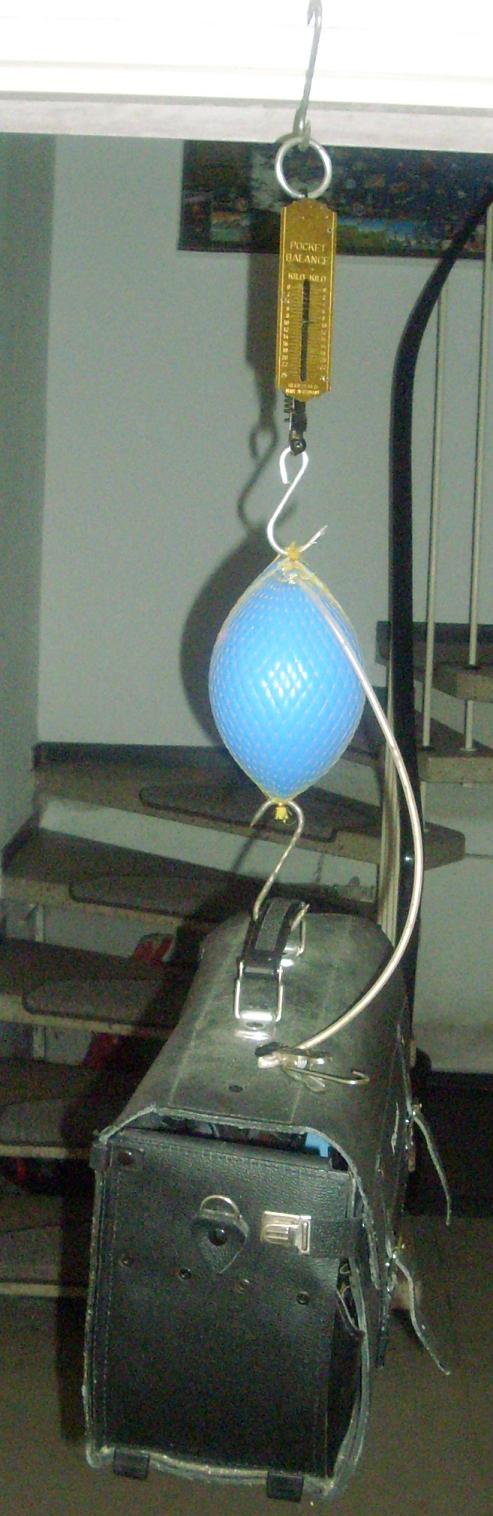
... when removing the nets from winter-bird-feeding-dumplings(?) i remembered our discussions about pneumatic muscles and tested one of the bigger nets with a inserted ballon
I burden the net with the empty balloon with 10kg and measured 200mm elongation ... then inflated the balloon and measured a contraction of 40mm against 100Newton.
I could have raised the burden to 25kg/250Newton, but my sons feared the loud bang if the balloon burst, or the net will then be torn and the bag crashes down, so we reduced the burden
It's a really strong 'muscle' - only the tube was a bit small, so the inflating/deflating lasted some seconds ...
Atached the images of the setup.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
I burden the net with the empty balloon with 10kg and measured 200mm elongation ... then inflated the balloon and measured a contraction of 40mm against 100Newton.
I could have raised the burden to 25kg/250Newton, but my sons feared the loud bang if the balloon burst, or the net will then be torn and the bag crashes down, so we reduced the burden
It's a really strong 'muscle' - only the tube was a bit small, so the inflating/deflating lasted some seconds ...
Atached the images of the setup.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: 95% reprappable repraps May 01, 2010 06:32PM |
Admin Registered: 17 years ago Posts: 1,791 |
Hmmm ... interesting.
Looking at that, I'm thinking about:
[www.gammods.com.au]
plus
Rubber surgical tubing.
-Sebastien, RepRap.org library gnome.
Remember, you're all RepRap developers (once you've joined the super-secret developer mailing list), and the wiki, RepRap.org, [reprap.org] is for everyone and everything!
Looking at that, I'm thinking about:
[www.gammods.com.au]
plus
Rubber surgical tubing.
-Sebastien, RepRap.org library gnome.
Remember, you're all RepRap developers (once you've joined the super-secret developer mailing list), and the wiki, RepRap.org, [reprap.org] is for everyone and everything!
|
Re: 95% reprappable repraps May 01, 2010 07:01PM |
Admin Registered: 16 years ago Posts: 13,891 |

|
Re: 95% reprappable repraps May 01, 2010 10:04PM |
Admin Registered: 17 years ago Posts: 1,791 |
Or do Daniel Lipsker/ spoolhead stuff and fabricate your own.
Edited 1 time(s). Last edit at 05/01/2010 10:21PM by SebastienBailard.
-Sebastien, RepRap.org library gnome.
Remember, you're all RepRap developers (once you've joined the super-secret developer mailing list), and the wiki, RepRap.org, [reprap.org] is for everyone and everything!
Edited 1 time(s). Last edit at 05/01/2010 10:21PM by SebastienBailard.
-Sebastien, RepRap.org library gnome.
Remember, you're all RepRap developers (once you've joined the super-secret developer mailing list), and the wiki, RepRap.org, [reprap.org] is for everyone and everything!
|
Re: 95% reprappable repraps May 02, 2010 09:57PM |
Registered: 14 years ago Posts: 105 |
SebastienBailard Wrote:
-------------------------------------------------------
> JohnnyCooper is working on:
> [objects.reprap.org]
>
> Monolithic+elastic sounds elegant, but dozens of
> rigid (modular) parts is much easier to get into
> for beginners.
>
> I think Cyberdyne_T-1 is a necessary waypoint for
> what you're proposing, Viktor.
SebastienBailard Wrote:
-------------------------------------------------------
> JohnnyCooper is working on:
> [objects.reprap.org]
>
> Monolithic+elastic sounds elegant, but dozens of
> rigid (modular) parts is much easier to get into
> for beginners.
>
> I think Cyberdyne_T-1 is a necessary waypoint for
> what you're proposing, Viktor.
Finished designing my spool valve last week. Machine shop is closed for the weekend though. Will hopefull have good news by wednesday.
-------------------------------------------------------
> JohnnyCooper is working on:
> [objects.reprap.org]
>
> Monolithic+elastic sounds elegant, but dozens of
> rigid (modular) parts is much easier to get into
> for beginners.
>
> I think Cyberdyne_T-1 is a necessary waypoint for
> what you're proposing, Viktor.
SebastienBailard Wrote:
-------------------------------------------------------
> JohnnyCooper is working on:
> [objects.reprap.org]
>
> Monolithic+elastic sounds elegant, but dozens of
> rigid (modular) parts is much easier to get into
> for beginners.
>
> I think Cyberdyne_T-1 is a necessary waypoint for
> what you're proposing, Viktor.
Finished designing my spool valve last week. Machine shop is closed for the weekend though. Will hopefull have good news by wednesday.
|
Re: 95% reprappable repraps May 07, 2010 12:06PM |
Registered: 14 years ago Posts: 105 |
Here are the files. This is design revision 1. Suggested changes are to double the depth of the spool and valve block allowing for larger holes. 1/8 holes aren't fun to tap threads in to.
Material isn't called out, but I recommend brass spools, and a steel valve block, or an alluminum valve block with overbored holes and a consumable sleave be machined from brass.
EDIT:
ABS should be fine for the low pressures that the reprap will be working with. UHMD and Delrin would probably be my choice plastics, but Nylon and Teflon would also be good choices.
Other design modifications I would recommend would be to make the valve block 2 parts, with the current blind holes being made in to through holes, and the "depth of bore" being controlled by face cutting the back of the valve block to dimension.
A feature that I think would improve function would be a set screw at the bottom of each bore allowing the max spool valve depth to be adjustable, making the other dimension's controlling the depth of the bores less critical.
Edited 1 time(s). Last edit at 05/07/2010 12:08PM by JohnnyCooper.
Material isn't called out, but I recommend brass spools, and a steel valve block, or an alluminum valve block with overbored holes and a consumable sleave be machined from brass.
EDIT:
ABS should be fine for the low pressures that the reprap will be working with. UHMD and Delrin would probably be my choice plastics, but Nylon and Teflon would also be good choices.
Other design modifications I would recommend would be to make the valve block 2 parts, with the current blind holes being made in to through holes, and the "depth of bore" being controlled by face cutting the back of the valve block to dimension.
A feature that I think would improve function would be a set screw at the bottom of each bore allowing the max spool valve depth to be adjustable, making the other dimension's controlling the depth of the bores less critical.
Edited 1 time(s). Last edit at 05/07/2010 12:08PM by JohnnyCooper.
|
Re: 95% reprappable repraps May 07, 2010 06:21PM |
Registered: 15 years ago Posts: 376 |
In my days in the machine tool industry. I remember there was a French company called Telemechanique that made spool valves with plastic bodies and they were quite good and very compact. They did have rubber 'o' rings in them though for sealing. So what you are suggesting is definately possible. Most machine tools run at pressures between 80 and 120 psi and you can design plastic bodied valves to take this. You need this pressure not only to overcome friction, but to also provide a strong fixed position at the end of the stroke that doesn't bounce. a way to overcome this might be to use fluidd instead of air.
The biggest stumbling block for pneumatics is that of accuracy of movement. Its OK for full stroke movement, but becomes very inaccurate when trying to stop at points along the stroke of a cylinder. The only way I can think of to achieve something like that would be to use a rotary air motor to replace the electric motor on a lead screw mechanism.
The biggest stumbling block for pneumatics is that of accuracy of movement. Its OK for full stroke movement, but becomes very inaccurate when trying to stop at points along the stroke of a cylinder. The only way I can think of to achieve something like that would be to use a rotary air motor to replace the electric motor on a lead screw mechanism.
|
Re: 95% reprappable repraps May 08, 2010 07:42AM |
Registered: 15 years ago Posts: 248 |
martinprice2004 Wrote:
-------------------------------------------------------
> In my days in the machine tool industry. I
> remember there was a French company called
> Telemechanique that made spool valves with plastic
> bodies and they were quite good and very compact.
> They did have rubber 'o' rings in them though for
> sealing. So what you are suggesting is definately
> possible. Most machine tools run at pressures
> between 80 and 120 psi and you can design plastic
> bodied valves to take this. You need this pressure
> not only to overcome friction, but to also provide
> a strong fixed position at the end of the stroke
> that doesn't bounce. a way to overcome this might
> be to use fluidd instead of air.
>
> The biggest stumbling block for pneumatics is that
> of accuracy of movement. Its OK for full stroke
> movement, but becomes very inaccurate when trying
> to stop at points along the stroke of a cylinder.
> The only way I can think of to achieve something
> like that would be to use a rotary air motor to
> replace the electric motor on a lead screw
> mechanism.
Also the static friction of the seals in the Cylinders make fine movement difficult without high energy losses.
The response required of this system is more akin to a servo system, which have high dynamics and high response, but their not very efficient in terms of energy.
-------------------------------------------------------
> In my days in the machine tool industry. I
> remember there was a French company called
> Telemechanique that made spool valves with plastic
> bodies and they were quite good and very compact.
> They did have rubber 'o' rings in them though for
> sealing. So what you are suggesting is definately
> possible. Most machine tools run at pressures
> between 80 and 120 psi and you can design plastic
> bodied valves to take this. You need this pressure
> not only to overcome friction, but to also provide
> a strong fixed position at the end of the stroke
> that doesn't bounce. a way to overcome this might
> be to use fluidd instead of air.
>
> The biggest stumbling block for pneumatics is that
> of accuracy of movement. Its OK for full stroke
> movement, but becomes very inaccurate when trying
> to stop at points along the stroke of a cylinder.
> The only way I can think of to achieve something
> like that would be to use a rotary air motor to
> replace the electric motor on a lead screw
> mechanism.
Also the static friction of the seals in the Cylinders make fine movement difficult without high energy losses.
The response required of this system is more akin to a servo system, which have high dynamics and high response, but their not very efficient in terms of energy.
|
Re: 95% reprappable repraps May 08, 2010 02:19PM |
Registered: 15 years ago Posts: 376 |
The method of using pneumatics on a machine requires an interface to the electrical system. The computer or microcontroller uses electric and you somehow have to change this into a pneumatic force. Most valves use a solenoid to move a small piston. This movement is almost always assisted by air (its called piloting or a pilot assisted valve). From my experience a metal valve ceased to actuate at pressures below about 20 psi as it needed this in the pilot system to move the spool. Things may have improved in recent years (My knowledge is 20 years ago) but I imagine the improvement wont be that great.
So your system will require the design of a solenoid or hundreds of micro solenoids to activate your pneumatics. So why not use the technology you will have developed to make the solenoid to actually do the work! (or make a motor) You only have to solve one problem instead of three. (The third is you wont need a compressed air generator)
So your system will require the design of a solenoid or hundreds of micro solenoids to activate your pneumatics. So why not use the technology you will have developed to make the solenoid to actually do the work! (or make a motor) You only have to solve one problem instead of three. (The third is you wont need a compressed air generator)
|
Re: 95% reprappable repraps May 08, 2010 02:39PM |
Registered: 14 years ago Posts: 105 |
|
Re: 95% reprappable repraps July 01, 2010 01:45AM |
Admin Registered: 13 years ago Posts: 730 |
Hi All,
I started a wiki review article on Actuator Fabrication that you might be interested in:
[www.reprap.org]
Many of you will be familiar with most of the information, but I would wager that even the most grizzled old replicators among you might find something new.
Please visit and add your own contributions!
-Matt
I started a wiki review article on Actuator Fabrication that you might be interested in:
[www.reprap.org]
Many of you will be familiar with most of the information, but I would wager that even the most grizzled old replicators among you might find something new.
Please visit and add your own contributions!
-Matt
|
Re: 95% reprappable repraps January 29, 2015 11:04AM |
Registered: 9 years ago Posts: 1 |
monolithic elastic, fascinating idea.
has it progressed further since 2010?
[reprap.org] (which also links to here) likewise hasnt been updated since 2011.
has there been a loss of momentum and motivation towards these goals of reducing vitamin ratio?
(still looking for design with best ratio of printed to non-printed parts ... this thread title was the best hope seen yet)
has it progressed further since 2010?
[reprap.org] (which also links to here) likewise hasnt been updated since 2011.
has there been a loss of momentum and motivation towards these goals of reducing vitamin ratio?
(still looking for design with best ratio of printed to non-printed parts ... this thread title was the best hope seen yet)
|
Re: 95% reprappable repraps January 29, 2015 11:30AM |
Admin Registered: 16 years ago Posts: 13,891 |
... there wasn't enough momentum -- but interersting enough in the next ten years anyway 
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
-- but interersting enough in the next ten years anyway Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: 95% reprappable repraps January 29, 2015 11:34AM |
Admin Registered: 13 years ago Posts: 730 |
This recent project by Delgir is kind of a monolithic elastic design: Parallel Flexure Test.Quote
Digit
monolithic elastic, fascinating idea.
has it progressed further since 2010?
Yes.Quote
Digit
has there been a loss of momentum and motivation towards these goals of reducing vitamin ratio?
You might be interested in the discussion in this thread: Convergence to self replicating.Quote
Digit
(still looking for design with best ratio of printed to non-printed parts ... this thread title was the best hope seen yet)
People often cite Nicholas Seward's designs as having a high ratio of printed to non-printed parts. Nicholas once proposed a machine called BOB Simpson, but I don't think he is currently working on it:
Quote
Nicholas Seward
I have been considering building the ultimate RepRap machine. The machine would use nothing but PLA for the whole robot with the exception of string, limit switches, steppers, controller board, and the hot end. I am dubbing the concept BOB Simpson (BOltless and Bearingless).
|
Re: 95% reprappable repraps January 29, 2015 03:54PM |
Registered: 9 years ago Posts: 135 |
It should be noted that Nicholas will likely be too busy for Simpson development for a while (if you wanted a clue as to why, his latest project was a crib), so someone else will have to step up to the plate to make BOB Simpson a reality if it ever will be.
Personally, I'm interested in conductive filament for making printed actuators. So far both ProtoPasta and Functionalize are each set to release a conductive filament. If one of those can be used to print out a coil for a DC motor, we may really be onto something.
EDIT: And then I remembered where I recognized the name Matt Moses, and I realize that you're no stranger to the drive for printing an actuator. (at least one of which is in my favorites on Thingiverse)
Edited 1 time(s). Last edit at 01/29/2015 04:28PM by Feign.
Personally, I'm interested in conductive filament for making printed actuators. So far both ProtoPasta and Functionalize are each set to release a conductive filament. If one of those can be used to print out a coil for a DC motor, we may really be onto something.
EDIT: And then I remembered where I recognized the name Matt Moses, and I realize that you're no stranger to the drive for printing an actuator. (at least one of which is in my favorites on Thingiverse)
Edited 1 time(s). Last edit at 01/29/2015 04:28PM by Feign.
|
Re: 95% reprappable repraps January 30, 2015 01:39AM |
Admin Registered: 13 years ago Posts: 730 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.