Home
>
Developers
>
Topic
Convergence to self replicating
Posted by PMCG
|
Convergence to self replicating December 23, 2012 01:28PM |
Registered: 11 years ago Posts: 5 |
I have been reading this forum for a while and I would like to give a hats off to all the rep rapper's out there. It's impressive.
I do have a question...
Aside from the electronics, is there any machines yet that can produce a part more accurate than the most accurate part it requires in it's construction?
Regards,
Paul.
I do have a question...
Aside from the electronics, is there any machines yet that can produce a part more accurate than the most accurate part it requires in it's construction?
Regards,
Paul.
|
Re: Convergence to self replicating December 23, 2012 06:19PM |
Admin Registered: 17 years ago Posts: 7,879 |
In terms of the plastic parts, yes many repraps print more accurate parts than those they are made of. The only plastic parts that limit accuracy are the pulleys and people have been able to iteratively improve those due to the averaging effect of the belt over several teeth.
[www.hydraraptor.blogspot.com]
[www.hydraraptor.blogspot.com]
|
Re: Convergence to self replicating January 06, 2013 01:08PM |
Registered: 11 years ago Posts: 5 |
Thanks nophead. Gave me something to think about.
Has anyone yet built a reprap that (besides the electronics) was 100% reproducible by the reprap. I know it probably wouldn't compare to current state of the art Reprap's where parts are introduced from the outside. I'm seeking to understand what the current limitations and restrictions are.
So you know where I'm coming from my background is in metallurgical and material engineering specializing in composite materials R&D with a hobby in numerical solvers which I would like to extend to self designing Reprap's. It seems an interesting problem and I have already made some progress on the solver restraint front, but I still need a better understanding on defining the problem and understanding the designs convergence looking at current designs.
As you can probably guess, I suspect it will take some time before I get anything practical to show, but I do appreciate any help people can provide.
Has anyone yet built a reprap that (besides the electronics) was 100% reproducible by the reprap. I know it probably wouldn't compare to current state of the art Reprap's where parts are introduced from the outside. I'm seeking to understand what the current limitations and restrictions are.
So you know where I'm coming from my background is in metallurgical and material engineering specializing in composite materials R&D with a hobby in numerical solvers which I would like to extend to self designing Reprap's. It seems an interesting problem and I have already made some progress on the solver restraint front, but I still need a better understanding on defining the problem and understanding the designs convergence looking at current designs.
As you can probably guess, I suspect it will take some time before I get anything practical to show, but I do appreciate any help people can provide.
|
Re: Convergence to self replicating January 06, 2013 02:16PM |
Admin Registered: 16 years ago Posts: 13,891 |
... I think, as long, as we can't print linear drives, the best way for 100%-replication would be mechanics with elastic/morphing structures or parallel kinematics with multiple grade solid-state-hinges ... but this type of mechanics needs complex software and sensors, so not really in the actual DIY-range ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Convergence to self replicating January 06, 2013 05:29PM |
Admin Registered: 13 years ago Posts: 730 |
Quote
PMCG
Has anyone yet built a reprap that (besides the electronics) was 100% reproducible by the reprap.
No.
Quote
VDX
as long, as we can't print linear drives
I think Viktor's assertion that "we can't print linear drives" is incorrect. We can print rotary motors (Printable solenoid motor, Printable flat coil motor). We can print gears and racks. So I think printing a linear drive is feasible.
I am not sure what Viktor means by "multiple grade solid-state bearings" by maybe it is similar to compliant mechanisms and living hinges? If so, then I agree heartily that this is a good way to make a reprap that does not rely on precision rods and bearings.
A number of people have worked on the building blocks of a printable reprap, and many of their projects are well documented on the wiki. The concept of using a family of tools that *collectively* self-replicate has also come up on occasion. I like to call these collectively self-replicating families of tools Cyclic Fabrication Systems, but that's just me.
Projects related to 100% printability and/or cyclic fabrication systems include: printable motors, printable circuit boards, Sarrus linkages, compliant and/or printed mechanisms for linear motion, printable lathes, printable extruder nozzles, paste and ceramic extruders, metal extruders, and others. Here is a small sampling:
Actuator Fabrication
Automated Circuitry Making
Printable Sarrus Linkage
Compliant Linear Motion Mechanism
Printable X/Y Linear Rail
Printable Lathe
Electroformed Nozzle
Printable Paste Extruder
Reprap Metal Deposition Experiments
Even though there is some interest in this area, not a lot of people around here actually care about converging to self-replicating. Most of the development energy in RepRap currently follows this model:
1. Build your first RepRap.
2. Think up a printer that looks different from the one you just made, but basically does the exact same thing.
3. Put it on Kickstarter/Indiegogo/Whatever
4. ???
5. Profit!
Take a look at the evolution of the popular low cost 3D printers out there, and you will see that they are actually moving *away* from self-replicating, in that they use more machined parts, more lasercut parts, and so on. Certainly there is little effort to eliminate things like motors and precision rods and bearings.
The reason for this is simple: There is no economic incentive to do so. And if you are a hobbyist who just wants to print things for other projects, why would you settle for a sub-standard machine just because it happens to be a little more "replicatable"? The (apparent) complete lack of interest in the Gada Prize is another indicator of this mindset. So, the self-replication research effort is left to passionate individuals who pursue it just because they think it is a cool idea.
Now, before people start writing angry responses defending their favorite machines, please understand I am not trying to disparage the excellent new printers that people here are developing. They are wonderful, they work better, I like them. They just don't have a lot to do with self-replication.
EDIT: Victor -> Viktor. Sorry Viktor!

Edited 1 time(s). Last edit at 01/06/2013 05:50PM by MattMoses.
|
Re: Convergence to self replicating January 06, 2013 05:45PM |
Registered: 11 years ago Posts: 5 |
I was thinking along the same lines parallel kinematics with multiple grade solid-state-hinges. If you have a look at google under "Qi Xia" "michael yu wang" level set optimization They have done trusses, micro tweezers, and other mechanics using similar methods to what I'm thinking of. Putting in the proper solver restraints and let the mechanics work themselves out unaided.
As for the software, once the inputs are digital can probably do neural net. Don't know...still thinking on that one.
As for the software, once the inputs are digital can probably do neural net. Don't know...still thinking on that one.
|
Re: Convergence to self replicating January 06, 2013 06:25PM |
Registered: 11 years ago Posts: 5 |
|
Re: Convergence to self replicating January 07, 2013 01:32PM |
Registered: 11 years ago Posts: 251 |
|
Re: Convergence to self replicating January 07, 2013 06:45PM |
Admin Registered: 16 years ago Posts: 13,891 |
... yes, you can print linear drives, but I think, the accuracy and rigidity isn't sufficient for common 'serious' working with the versions I've seen until now 
In the last 15 years I was working in the micro-/nanotech business (actually industrial CAD-software development) and then we develped some really interesting parts regarding handling/assembly, accuracy and such.
It's possible to make most of the parts needed for a RepRap (even a big count of the 'vitamins' and some new/superior techniques and materials) with alternative microtech-methods, that can be redefined as 'self-replicating', but the complexity and cost of the resources is actually out of the DIY-range.
One of my goals is 'homebrew-nanotech' in maybe ten years ... have some of the needed tools, methodes and materials/chemistry already there, but it's a really complex area for DIY/homebrew ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
In the last 15 years I was working in the micro-/nanotech business (actually industrial CAD-software development) and then we develped some really interesting parts regarding handling/assembly, accuracy and such.
It's possible to make most of the parts needed for a RepRap (even a big count of the 'vitamins' and some new/superior techniques and materials) with alternative microtech-methods, that can be redefined as 'self-replicating', but the complexity and cost of the resources is actually out of the DIY-range.
One of my goals is 'homebrew-nanotech' in maybe ten years ... have some of the needed tools, methodes and materials/chemistry already there, but it's a really complex area for DIY/homebrew ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Convergence to self replicating January 07, 2013 07:38PM |
Admin Registered: 13 years ago Posts: 730 |
Quote
konwiddak
Someone made this: [www.youtube.com]
I don't know if its ever been made into a complete reprap.
That is fdavies's Printable Sarrus Linkage
He has a lot of work on thingiverse. I wonder if he is still working on this? Fdavies are you out there?
Quote
VDX
It's possible to make most of the parts needed for a RepRap (even a big count of the 'vitamins' and some new/superior techniques and materials) with alternative microtech-methods, that can be redefined as 'self-replicating', but the complexity and cost of the resources is actually out of the DIY-range.
Can you elaborate on these alternative microtech-methods at all, Viktor? And can you tell us what you mean by a "multiple grade solid-state-hinge"? Is it like a living hinge? I am really interested in this stuff, and I know you are expert in all kinds of laser- and micro- fabrication methods.
 Can you point us to any links or articles?
Can you point us to any links or articles?
|
Re: Convergence to self replicating January 08, 2013 04:48PM |
Admin Registered: 16 years ago Posts: 13,891 |
... attached are some samples for monolithic parallel kinematics and hinged structures 
We had some interesting discussions about tripods some years ago ( [forums.reprap.org] ) ... maybe "Rostok" is based on this threads and on my demo-setup: [builders.reprap.org]
In the previous link you can go down to my blog "LOM-fabbing with a CNC-repstrap" for another potentially interesting idea.
With 'new materials' I was referring to magnetic memory alloys based on NiMnGa, that changes shape/length similar to PZT-actuators (Piezo's), but not by applying HV, but with a strong magnetic field ... and not only around 0.3% as with PZT, but 5% to 10% contraction or elongation of a block structure! --- Unfortunately the company producing and selling this phantastic stuff isn't active anymore
... much more related infos are spread over the forums and years ...
Edited 1 time(s). Last edit at 01/08/2013 04:53PM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
We had some interesting discussions about tripods some years ago ( [forums.reprap.org] ) ... maybe "Rostok" is based on this threads and on my demo-setup: [builders.reprap.org]
In the previous link you can go down to my blog "LOM-fabbing with a CNC-repstrap" for another potentially interesting idea.
With 'new materials' I was referring to magnetic memory alloys based on NiMnGa, that changes shape/length similar to PZT-actuators (Piezo's), but not by applying HV, but with a strong magnetic field ... and not only around 0.3% as with PZT, but 5% to 10% contraction or elongation of a block structure! --- Unfortunately the company producing and selling this phantastic stuff isn't active anymore
... much more related infos are spread over the forums and years ...
Edited 1 time(s). Last edit at 01/08/2013 04:53PM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Convergence to self replicating January 09, 2013 12:47AM |
Admin Registered: 13 years ago Posts: 730 |
|
Re: Convergence to self replicating January 09, 2013 02:11AM |
Admin Registered: 16 years ago Posts: 13,891 |
... this is his dissertation from 2004 - here you can find some ideas and calculations to hinged structures.
I was in contact with him then and we exchanged some related ideas and parts (they used some of my grippers).
Ask, if you want some more detailed infos ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
I was in contact with him then and we exchanged some related ideas and parts (they used some of my grippers).
Ask, if you want some more detailed infos ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Convergence to self replicating January 09, 2013 10:47AM |
Admin Registered: 16 years ago Posts: 13,891 |
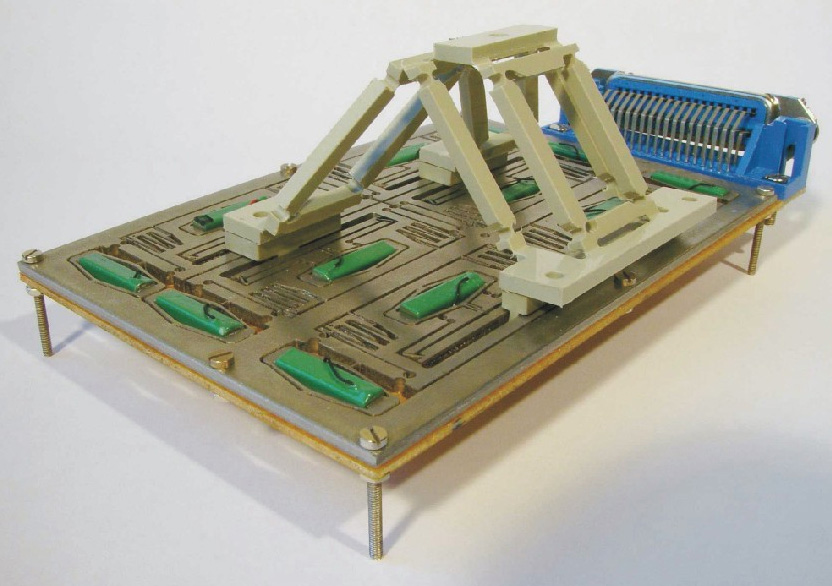
... by the way, maybe interesting too - found a photo of my last two micro-/nano- handling- and assembly-stages now collecting dust in the basement:
The right one (aluminium base frame) is a combination of manual XY- and Z-sliders (from microscopy) and magnetically driven Ferrofluid-supported XY-actuator (the bigger blue plate) and a Z-actuator (smaller vertical blue box) with manual driving ranges of maybe 30mm and voltage-controlled fine-positioning with maybe 0.5mm in XYZ and nanometer resolution (the actuators) - controlled by the drivers in the base or by an extrenal 3-channel DAC.
The bigger black-blue device on the left is a converted SMD-pick-n-placer with a XYZ-actuator (the white box on the left) with 1mm positioning range and same nm-resolution but controlled by the '4D-joystick' under the blue hand-rest. Here you can see two microscope-cameras attached to the SMD-placer head (the two slanted aluminium cylinders).
With this stages I've assembled and glued together several micro-sensors, optical switches and the optics for fiberscopes with single parts of some ten to hundred micrometers size and positioning accuracies down to single microns (but could be nanometer-accuracy with proper measuring too).
Edited 1 time(s). Last edit at 01/09/2013 10:48AM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]

The right one (aluminium base frame) is a combination of manual XY- and Z-sliders (from microscopy) and magnetically driven Ferrofluid-supported XY-actuator (the bigger blue plate) and a Z-actuator (smaller vertical blue box) with manual driving ranges of maybe 30mm and voltage-controlled fine-positioning with maybe 0.5mm in XYZ and nanometer resolution (the actuators) - controlled by the drivers in the base or by an extrenal 3-channel DAC.
The bigger black-blue device on the left is a converted SMD-pick-n-placer with a XYZ-actuator (the white box on the left) with 1mm positioning range and same nm-resolution but controlled by the '4D-joystick' under the blue hand-rest. Here you can see two microscope-cameras attached to the SMD-placer head (the two slanted aluminium cylinders).
With this stages I've assembled and glued together several micro-sensors, optical switches and the optics for fiberscopes with single parts of some ten to hundred micrometers size and positioning accuracies down to single microns (but could be nanometer-accuracy with proper measuring too).
Edited 1 time(s). Last edit at 01/09/2013 10:48AM by VDX.
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Convergence to self replicating January 09, 2013 03:19PM |
Admin Registered: 13 years ago Posts: 730 |
 That must be some basement!
That must be some basement!{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Re: Convergence to self replicating January 09, 2013 04:16PM |
Admin Registered: 16 years ago Posts: 13,891 |
... there were several different setups and gripper-types - mechanical, vacuum, icing, glue, magnetic, electrostatic, PZT and SMA (morphing alloys) ... depending on the object size and special requirements.
I've developed some special handling systems for nano-wires and CNT's or laserdiode-welding/brazing with 1 micron thick platinum wires and such ...
Some of this equipment and parts are 'remnants' from projects or developments I've made as freelancer or in my time for Gerwah Mikrotechnik ... others was made for my own needs or for testing some special 'home-brew-nanotech' concepts before going public
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
I've developed some special handling systems for nano-wires and CNT's or laserdiode-welding/brazing with 1 micron thick platinum wires and such ...
Some of this equipment and parts are 'remnants' from projects or developments I've made as freelancer or in my time for Gerwah Mikrotechnik ... others was made for my own needs or for testing some special 'home-brew-nanotech' concepts before going public
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Convergence to self replicating January 11, 2013 02:14AM |
Registered: 11 years ago Posts: 34 |
|
Re: Convergence to self replicating January 11, 2013 03:05AM |
Admin Registered: 16 years ago Posts: 13,891 |
... I've used all sorts of materials and methodes:
- plastics: POM, PEEK, elastic polymers - solid blocks/sheets for milling, powders, pastes and chemistry for 3D-printing/curing/coating
- glass: - solid sheets for etching, powders for fusing/glass-soldering or 3D-printing with paste
- ceramics: - limestone and MACOR for milling, 'green' sheets for 3D-shaping and sintering, powders for pastes and SLS
- metals: - aluminium, brass, steel, titanium, platinum, gold - solids for milling, powders for brazing and micro-SLS
- complex materials: - ferrofluids, magnetorheological mixtures, shape-memory-alloys (thermal, electrostatic or magnetically activated)
- nanowires: - CNT's and metal nanowires
... and more - it's a really wide/complex field
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
- plastics: POM, PEEK, elastic polymers - solid blocks/sheets for milling, powders, pastes and chemistry for 3D-printing/curing/coating
- glass: - solid sheets for etching, powders for fusing/glass-soldering or 3D-printing with paste
- ceramics: - limestone and MACOR for milling, 'green' sheets for 3D-shaping and sintering, powders for pastes and SLS
- metals: - aluminium, brass, steel, titanium, platinum, gold - solids for milling, powders for brazing and micro-SLS
- complex materials: - ferrofluids, magnetorheological mixtures, shape-memory-alloys (thermal, electrostatic or magnetically activated)
- nanowires: - CNT's and metal nanowires
... and more - it's a really wide/complex field
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Convergence to self replicating January 11, 2013 08:24AM |
Registered: 15 years ago Posts: 376 |
Some interesting points here. Its a common misconception that a machine cannot produce a part more accurately than itself. It can. If it couldn't we would never be able to produce the accurate machines we have today from the wooden ones we had in the middle ages. Its been suggested above that "averaging" is one means. You could use several guides for each axes and average across them.
Another to bear in mind is "scaling". A pantograph mechanism for example, you can use a large master and produce a much more accurate but smaller part. It was used to make dies for coins. I mention this because it may be possible to produce a fairly rough, but long linear guide, but scale the tool head movement using a pantograph to get it more accurate. Combine this with averaging and you might have a very good linear movement using poor parts.
A geared belt drive is another example where scaling can improve resolution and accuracy. Its good for increasing rotational accuracy.
Of course there is the SCARA and Delta robots which could remove linear axes completely. My gut feeling is that the cartesian reprap will hit a brick wall very soon and that UV curing and powder sintering will come up to replace it. These machines can have less dependancy on linear movement. I am thinking of a fixed laser which scans using a pivoting head.
Another to bear in mind is "scaling". A pantograph mechanism for example, you can use a large master and produce a much more accurate but smaller part. It was used to make dies for coins. I mention this because it may be possible to produce a fairly rough, but long linear guide, but scale the tool head movement using a pantograph to get it more accurate. Combine this with averaging and you might have a very good linear movement using poor parts.
A geared belt drive is another example where scaling can improve resolution and accuracy. Its good for increasing rotational accuracy.
Of course there is the SCARA and Delta robots which could remove linear axes completely. My gut feeling is that the cartesian reprap will hit a brick wall very soon and that UV curing and powder sintering will come up to replace it. These machines can have less dependancy on linear movement. I am thinking of a fixed laser which scans using a pivoting head.
|
Re: Convergence to self replicating January 11, 2013 10:38AM |
Registered: 11 years ago Posts: 5 |
We can see from MattMoses and VDX discussions +-1e9 metre are achievable in home brew. Very interesting stuff. It seems skies the limits on whats possible.
martinprice2004 I agree with you on the scaling and averaging. It would be interesting if we use first generation positioning drive for fast movement and a finer second, or third generation positioning drive for finer movement (or position correction) as long as the position measurement is independent of the drives. Like a microscope stand.
martinprice2004 I agree with you on the scaling and averaging. It would be interesting if we use first generation positioning drive for fast movement and a finer second, or third generation positioning drive for finer movement (or position correction) as long as the position measurement is independent of the drives. Like a microscope stand.
|
Re: Convergence to self replicating January 11, 2013 12:48PM |
Admin Registered: 13 years ago Posts: 730 |
martinprice2004's comment about the pantograph reminded me of Feynman's lecture "There's Plenty of Room at the Bottom". Everyone here already knows about this lecture, right?
Feynman suggested a recursive manufacturing system for making small things. He noted that "At each stage, it is necessary to improve the precision of the apparatus."
RepRap users do this by a few ways. First, a lot of the precision is already built into the raw materials - the precision rods and bearings, the tiny hole in the extruder nozzle, the stepper motors, and so on. Second, builders go through a calibration and adjustment process, where the output of the machine is measured, and then corrections are made to improve its performance. (David Gingery used metal scraping to improve the accuracy of his homemade lathe.)
Feynman discusses some of the problems with using pantographs, and he mentions a few ways to naturally increase the precision of mechanical components. Joseph Whitworth is famous for developing many of these processes, including metal scraping.
We all agree that a machine can make more precise parts than the parts it is made from, but some kind of calibration and adjustment process is essential for this to happen.
Here is the part of Feynman's lecture about the pantograph. (Sorry for so much text!) You can read more about the lecture and find the full text here and here.
EDIT: martinprince2004 -> martinprice2004. Spelling names is hard
Edited 1 time(s). Last edit at 01/11/2013 12:51PM by MattMoses.
Feynman suggested a recursive manufacturing system for making small things. He noted that "At each stage, it is necessary to improve the precision of the apparatus."
RepRap users do this by a few ways. First, a lot of the precision is already built into the raw materials - the precision rods and bearings, the tiny hole in the extruder nozzle, the stepper motors, and so on. Second, builders go through a calibration and adjustment process, where the output of the machine is measured, and then corrections are made to improve its performance. (David Gingery used metal scraping to improve the accuracy of his homemade lathe.)
Feynman discusses some of the problems with using pantographs, and he mentions a few ways to naturally increase the precision of mechanical components. Joseph Whitworth is famous for developing many of these processes, including metal scraping.
We all agree that a machine can make more precise parts than the parts it is made from, but some kind of calibration and adjustment process is essential for this to happen.
Here is the part of Feynman's lecture about the pantograph. (Sorry for so much text!) You can read more about the lecture and find the full text here and here.
Quote
Feynman
Now comes the interesting question: How do we make such a tiny mechanism? I leave that to you. However, let me suggest one weird possibility. You know, in the atomic energy plants they have materials and machines that they can't handle directly because they have become radioactive. To unscrew nuts and put on bolts and so on, they have a set of master and slave hands, so that by operating a set of levers here, you control the "hands" there, and can turn them this way and that so you can handle things quite nicely.
Most of these devices are actually made rather simply, in that there is a particular cable, like a marionette string, that goes directly from the controls to the "hands." But, of course, things also have been made using servo motors, so that the connection between the one thing and the other is electrical rather than mechanical. When you turn the levers, they turn a servo motor, and it changes the electrical currents in the wires, which repositions a motor at the other end.
Now, I want to build much the same device – a master-slave system which operates electrically. But I want the slaves to be made especially carefully by modern large-scale machinists so that they are one-fourth the scale of the "hands" that you ordinarily maneuver. So you have a scheme by which you can do things at one- quarter scale anyway – the little servo motors with little hands play with little nuts and bolts; they drill little holes; they are four times smaller. Aha! So I manufacture a quarter-size lathe; I manufacture quarter-size tools; and I make, at the one-quarter scale, still another set of hands again relatively one-quarter size! This is one-sixteenth size, from my point of view. And after I finish doing this I wire directly from my large-scale system, through transformers perhaps, to the one-sixteenth-size servo motors. Thus I can now manipulate the one-sixteenth size hands.
Well, you get the principle from there on. It is rather a difficult program, but it is a possibility. You might say that one can go much farther in one step than from one to four. Of course, this has all to be designed very carefully and it is not necessary simply to make it like hands. If you thought of it very carefully, you could probably arrive at a much better system for doing such things.
If you work through a pantograph, even today, you can get much more than a factor of four in even one step. But you can't work directly through a pantograph which makes a smaller pantograph which then makes a smaller pantograph – because of the looseness of the holes and the irregularities of construction. The end of the pantograph wiggles with a relatively greater irregularity than the irregularity with which you move your hands. In going down this scale, I would find the end of the pantograph on the end of the pantograph on the end of the pantograph shaking so badly that it wasn't doing anything sensible at all.
At each stage, it is necessary to improve the precision of the apparatus. If, for instance, having made a small lathe with a pantograph, we find its lead screw irregular – more irregular than the large-scale one – we could lap the lead screw against breakable nuts that you can reverse in the usual way back and forth until this lead screw is, at its scale, as accurate as our original lead screws, at our scale.
We can make flats by rubbing unflat surfaces in triplicates together – in three pairs – and the flats then become flatter than the thing you started with. Thus, it is not impossible to improve precision on a small scale by the correct operations. So, when we build this stuff, it is necessary at each step to improve the accuracy of the equipment by working for awhile down there, making accurate lead screws, Johansen blocks, and all the other materials which we use in accurate machine work at the higher level. We have to stop at each level and manufacture all the stuff to go to the next level – a very long and very difficult program. Perhaps you can figure a better way than that to get down to small scale more rapidly.
EDIT: martinprince2004 -> martinprice2004. Spelling names is hard
Edited 1 time(s). Last edit at 01/11/2013 12:51PM by MattMoses.
|
Re: Convergence to self replicating August 06, 2017 04:19AM |
Registered: 6 years ago Posts: 8 |
Feynman's electromechanical pantograph idea was popularized in a sci fi anthology I read some years ago. Waldo, it was called, I think.
He refers to the problem in the space dimension and is stumped by its insolubility on the time dimension. It takes "forever".
The promise of the RepRap was as I first heard it that there would be wealth without money. There would be some many of the darn things the cost of everything would plummet.
That isn't happening. I'm not satisfied. But it can happen.
Parallel processing and processor sharing is key to this problem,...and we are the processors. A little ego death and demonetization wouldn't hurt.
See"Bateson" for some thoughts on a highly parallelized design for a RepRap, and for RepRaps in general, and in deployment.
Thank you.
Doug
He refers to the problem in the space dimension and is stumped by its insolubility on the time dimension. It takes "forever".
The promise of the RepRap was as I first heard it that there would be wealth without money. There would be some many of the darn things the cost of everything would plummet.
That isn't happening. I'm not satisfied. But it can happen.
Parallel processing and processor sharing is key to this problem,...and we are the processors. A little ego death and demonetization wouldn't hurt.
See"Bateson" for some thoughts on a highly parallelized design for a RepRap, and for RepRaps in general, and in deployment.
Thank you.
Doug
|
Re: Convergence to self replicating August 06, 2017 07:36AM |
Registered: 11 years ago Posts: 5,780 |
Are you the guy I heard was working on 3D printing at area 51 using alien technology? Has the USAF finally declassified your work? I think a transporter network, with a just few tweaks, could be used as a duplicator and delivery network without any factories or drones (well, OK, maybe for the "last mile", but only until transporter stations become household appliances).
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
Ultra MegaMax Dominator 3D printer: [drmrehorst.blogspot.com]
|
Re: Convergence to self replicating August 06, 2017 07:33PM |
Admin Registered: 13 years ago Posts: 730 |
Hi D.Goncz,
If I remember correctly, Feynman actually got some of his ideas from Waldo, not the other way around. Heinlein published Waldo in 1942, and Feynman gave his lecture in 1959. Apparently Feynman learned of Waldo from his friend/student Albert Hibbs, and the story just gets weirder and weirder the deeper you go down (see Feynman, Waldo and the Wickedest Man in the World).
You might be interested in some of these other projects/discussions related to self-replication:
RelayRepRap
[forums.reprap.org]
[forums.reprap.org]
If I remember correctly, Feynman actually got some of his ideas from Waldo, not the other way around. Heinlein published Waldo in 1942, and Feynman gave his lecture in 1959. Apparently Feynman learned of Waldo from his friend/student Albert Hibbs, and the story just gets weirder and weirder the deeper you go down (see Feynman, Waldo and the Wickedest Man in the World).
You might be interested in some of these other projects/discussions related to self-replication:
RelayRepRap
[forums.reprap.org]
[forums.reprap.org]
Sorry, only registered users may post in this forum.