Rostock Problem
geschrieben von Tripi
|
Rostock Problem 17. March 2013 19:32 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
Hallo
Habe soeben meinen Rostock zusammengebaut und wollte ihn jetzt in Betrieb nehmen.
Die 3 Motoren sind angschlossen
X-Y-Z max Endstops sind angeschlossen
Marlin Firmware raufgespielt
wenn ich mich mit Printer Interface connecte und zB auf Y(HAUS) drücke fahren alle 3 Achsen volle kanne runter und chrashen in die Platte.
Leider ist das mein erster Reprap daher habe ich noch nicht so die Erfahrung
Eventuell könnt mir wer weiterhelfen. Danke im vorraus
Habe soeben meinen Rostock zusammengebaut und wollte ihn jetzt in Betrieb nehmen.
Die 3 Motoren sind angschlossen
X-Y-Z max Endstops sind angeschlossen
Marlin Firmware raufgespielt
wenn ich mich mit Printer Interface connecte und zB auf Y(HAUS) drücke fahren alle 3 Achsen volle kanne runter und chrashen in die Platte.
Leider ist das mein erster Reprap daher habe ich noch nicht so die Erfahrung
Eventuell könnt mir wer weiterhelfen. Danke im vorraus
|
Re: Rostock Problem 18. March 2013 02:54 |
Administrator Registrierungsdatum: 16 Jahre zuvor Beiträge: 13.891 |
... die Homing-Richtung sollte Oben sein - das kannst du in der config anpassen
Schau dann auch, ob die Endstops richtig belegt und definiert sind ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Schau dann auch, ob die Endstops richtig belegt und definiert sind ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Rostock Problem 18. March 2013 05:06 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
So jetzt habe ich folgendes verändert:
// The pullups are needed if you directly connect a mechanical endswitch between the signal and ground pins.
const bool X_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Y_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Z_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
//#define DISABLE_MAX_ENDSTOPS
von false auf true
Jetzt fährt er hoch mit allen 3 Achsen bleibt aber bei den Endstops nicht stehen sondern kracht voll drauf:
hier ein Video:
[www.youtube.com]
// The pullups are needed if you directly connect a mechanical endswitch between the signal and ground pins.
const bool X_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Y_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
const bool Z_ENDSTOPS_INVERTING = true; // set to true to invert the logic of the endstops.
//#define DISABLE_MAX_ENDSTOPS
von false auf true
Jetzt fährt er hoch mit allen 3 Achsen bleibt aber bei den Endstops nicht stehen sondern kracht voll drauf:
hier ein Video:
[www.youtube.com]
|
Re: Rostock Problem 18. March 2013 05:29 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
|
Re: Rostock Problem 18. March 2013 05:34 |
Administrator Registrierungsdatum: 16 Jahre zuvor Beiträge: 13.891 |
... du mußt die Richtung der Achsen, die Richtung der Home-Position, die korrekten Schalter (MIN oder MAX) und die passende Logik (HIGH- oder LOW-aktiv) einstellen, damit das paßt ...
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
Viktor
--------
Aufruf zum Projekt "Müll-freie Meere" - [reprap.org] -- Deutsche Facebook-Gruppe - [www.facebook.com]
Call for the project "garbage-free seas" - [reprap.org]
|
Re: Rostock Problem 18. March 2013 06:16 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
so jetzt bin ich ein stück weiter auf jeden fall bleibt er schon mal an den endstops stehen:
[www.youtube.com]
wie gehe ich jetzt weiter vor ? ich schaff es zb nicht die achsen manuell zu verfahren... das wäre schon ein großer schritt für mich
folgendes wir ausgeworfen:
echo: External Reset
Marlin 1.0.0
echo: Last Updated: Mar 18 2013 09:53:20 | Author: (jcrocholl, deltabot)
Compiled: Mar 18 2013
echo: Free Memory: 3461 PlannerBufferBytes: 2464
echo:Using Default settings:
echo teps per unit:
teps per unit:
echo: M92 X80.00 Y80.00 Z80.00 E762.00
echo:Maximum feedrates (mm/s):
echo: M203 X300.00 Y300.00 Z300.00 E300.00
echo:Maximum Acceleration (mm/s2):
echo: M201 X9000 Y9000 Z9000 E9000
echo:Acceleration: S=acceleration, T=retract acceleration
echo: M204 S3000.00 T3000.00
echo:Advanced variables: S=Min feedrate (mm/s), T=Min travel feedrate (mm/s), B=minimum segment time (ms), X=maximum xY jerk (mm/s), Z=maximum Z jerk (mm/s)
echo: M205 S0.00 T0.00 B20000 X20.00 Z20.00 E20.00
echo:Home offset (mm):
echo: M206 X0.00 Y0.00 Z0.00
echo ID settings:
ID settings:
echo: M301 P22.20 I1.08 D114.00
Error:0
: Extruder switched off. MINTEMP triggered !
Errorrinter stopped due to errors. Fix the error and use M999 to restart. (Temperature is reset. Set it after restarting)
echoD init fail
ok T:0.0 /0.0 B:0.0 /0.0 @:0 B@:0
und wenn ich irgendeine achse verfahren will kommt folgendes hinzu:
Printer stopped due to errors. Fix the error and use M999 to restart. (Temperature is reset. Set it after restarting)
[www.youtube.com]
wie gehe ich jetzt weiter vor ? ich schaff es zb nicht die achsen manuell zu verfahren... das wäre schon ein großer schritt für mich
folgendes wir ausgeworfen:
echo: External Reset
Marlin 1.0.0
echo: Last Updated: Mar 18 2013 09:53:20 | Author: (jcrocholl, deltabot)
Compiled: Mar 18 2013
echo: Free Memory: 3461 PlannerBufferBytes: 2464
echo:Using Default settings:
echo
teps per unit:echo: M92 X80.00 Y80.00 Z80.00 E762.00
echo:Maximum feedrates (mm/s):
echo: M203 X300.00 Y300.00 Z300.00 E300.00
echo:Maximum Acceleration (mm/s2):
echo: M201 X9000 Y9000 Z9000 E9000
echo:Acceleration: S=acceleration, T=retract acceleration
echo: M204 S3000.00 T3000.00
echo:Advanced variables: S=Min feedrate (mm/s), T=Min travel feedrate (mm/s), B=minimum segment time (ms), X=maximum xY jerk (mm/s), Z=maximum Z jerk (mm/s)
echo: M205 S0.00 T0.00 B20000 X20.00 Z20.00 E20.00
echo:Home offset (mm):
echo: M206 X0.00 Y0.00 Z0.00
echo
ID settings:echo: M301 P22.20 I1.08 D114.00
Error:0
: Extruder switched off. MINTEMP triggered !
Error
rinter stopped due to errors. Fix the error and use M999 to restart. (Temperature is reset. Set it after restarting)echo
D init failok T:0.0 /0.0 B:0.0 /0.0 @:0 B@:0
und wenn ich irgendeine achse verfahren will kommt folgendes hinzu:
Printer stopped due to errors. Fix the error and use M999 to restart. (Temperature is reset. Set it after restarting)
|
Re: Rostock Problem 18. March 2013 06:19 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
|
Re: Rostock Problem 18. March 2013 06:37 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 18. March 2013 06:42 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
Ich baue ebenfalls einen Rostock 3D Drucker zusammen. Hast Du schon mal diese Firmware probiert?
[github.com]
Achtung deine Einstellungen musst du anpassen!
[github.com]
Achtung deine Einstellungen musst du anpassen!
|
Re: Rostock Problem 18. March 2013 07:00 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 18. March 2013 07:31 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 18. March 2013 07:37 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
|
Re: Rostock Problem 18. March 2013 08:07 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 308 |
|
Re: Rostock Problem 18. March 2013 08:25 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 1.807 |
ok,
zunächst nehmt diese Firmware, die funktionert (habe einen Rostock-Mini und viele Marlin Derivate ausprobiert):
Bei G28 (Home all Axes, Hauslogo) ist es normal das die alle nacheinander "nullen".
Wer einen Rostock hat muss folgendes anpassen (Marlin.ino):
DELTA_DIAGONAL_ROD 250 mm (anstatt 186mm)
DELTA_SMOOTH_ROD_OFFSET 175 mm (anstatt 139,5 mm)
DELTA_EFFECTOR_OFFSET 33 mm (bleibt)
DELTA_CARRIAGE_OFFSET 18 mm (ich habe 22 mm, müsst Ihr nachmessen).
Schau:
[forums.reprap.org]
Kalibrieren:
wie habe ich das gemacht ...
Nachdem die PID Werte (Hotend und Heizbett M301 und vielleicht M303 Befehl), die Zahnradteilung (Bsp.: T2.5 18 Zähne = 71.1111) und die Endstops (X / Y / Z / MAX ..., bei G28 beim mini x0 y0 und z = ca. 173 mm, ergo x0 /y0 /z0 ist mitte, mitte Platte und Düse berührt die WARME Heizplatte) eingestellt sind ...
Bsp. in Configuration.h:
// ROSTOCK MINI WOLFGANG HOTEND
#define DEFAULT_Kp 21.72
#define DEFAULT_Ki 1.52
#define DEFAULT_Kd 77.57
und:
#define DEFAULT_AXIS_STEPS_PER_UNIT {71.1111, 71.1111, 71.1111, 100}
Erst mal die Düse kalibieret (20x20x10 mit 0.5 mm Wandung) -> Wert Bsp. 0,56 mm in Slic3r Printer Settings / Advanced ... eintragen.
Danach Würfel gedruckt (20x20x10 wegen Tempratur und Material etc..) wegen Extruder -> Materialfluss nachschauen ob grob zu viel Material oder zu wenig.
Erst einmal egal was da rauskommt an Werten (19x19,2x9,8 mm wäre jetzt erst mal egal, erst mal weiterlesen, Jungs).
Danach habe ich mir speziellen 8-Kant gezeichnet (0°- 30°- 90°- 150°- 180°-210°- 270°- 330° ) SW 60 mm 3 mm hoch, SW 40 3mm hoch, SW 20 3mm hoch, Insgesamt 9 mm hoch und eine 10 mm Bohrung in der Mitte. (Kalibrierklotz werd ich endlich mal in Thingiverse posten .. trage ich nach, versprochen).
Die "X Schlüsselfläche ist erst mal eine Resultierende.
Wenn die Y Schlüsselfläche genau der Schlüsselfläche y -30 Grad und y + 30 Grad ist, dann gut, sonst müsst Ihr die Türme komplett nachjustieren um diese Differenz (Beispiel Turm X gut, Turm Y gut und Turm Z -0,2 mm Versatz. Somit schrauben auf und zwei lagen Papier a` 0,1 mm zwischen Platte und achter Welle gelegt. Wieder zusammenschrauben, Achtkant drucken bis es für euch Akzeptabel ist, Sch...Arbeit, ist mir bisher nix besseres eingefallen).
Sollte der Achtkant endlich an allen Schlüsselflächen eine Gleichmässigkeit von z.B. 59,8 mm /39,8mm / und 19,8 mm haben (Wenn der Versatz um je. 20 mm nicht ungefähr gleich Linear ist, habt ihr mit den Wert 71.1111 ein Problem) dann zieht ihr diesen Wert am
DELTA_SMOOTH_ROD_OFFSET 175 mm ergo -> 174.8 mm. (der Radiuswert ist formal der Richtige)
oder
DELTA_CARRIAGE_OFFSET 18 mm ergo -> 17.8 mm
(eigentlich auch egal wo, weil:
#define DELTA_RADIUS (DELTA_SMOOTH_ROD_OFFSET-DELTA_EFFECTOR_OFFSET-DELTA_CARRIAGE_OFFSET))
Dann ist euer Rostock kalibriert.
Nachtrag:
Sorry, wie die Max-Endstops einstellen also erst mal G28, dann:
G1 Y50 Z3 und 0,1 mm Schritte auf Z bis Papier an warmen Heizbett kratzt ,
Wert z.B 0,5 nachrichten an den "Z-Turm" danach
G1 Y-50 X-50 Z3 ebenso auf Z bis Papier kratzt, Ergebnis ebenso an den X-Turm Nachstellen. und zuletzt
G1 Y-50 X50 Z3 ebenso auf Z bis Papier kratzt, Y-Turm ... klar oder ..., -> bei M3 ist eine Umdrehung 0,5 mm Höhe.
Wurde grade gefragt, dachte das ist so selbstverständlich.
Have Fun
Angelo
3-mal bearbeitet. Zuletzt am 18.03.13 11:07.
zunächst nehmt diese Firmware, die funktionert (habe einen Rostock-Mini und viele Marlin Derivate ausprobiert):
Bei G28 (Home all Axes, Hauslogo) ist es normal das die alle nacheinander "nullen".
Wer einen Rostock hat muss folgendes anpassen (Marlin.ino):
DELTA_DIAGONAL_ROD 250 mm (anstatt 186mm)
DELTA_SMOOTH_ROD_OFFSET 175 mm (anstatt 139,5 mm)
DELTA_EFFECTOR_OFFSET 33 mm (bleibt)
DELTA_CARRIAGE_OFFSET 18 mm (ich habe 22 mm, müsst Ihr nachmessen).
Schau:
[forums.reprap.org]
Kalibrieren:
wie habe ich das gemacht ...
Nachdem die PID Werte (Hotend und Heizbett M301 und vielleicht M303 Befehl), die Zahnradteilung (Bsp.: T2.5 18 Zähne = 71.1111) und die Endstops (X / Y / Z / MAX ..., bei G28 beim mini x0 y0 und z = ca. 173 mm, ergo x0 /y0 /z0 ist mitte, mitte Platte und Düse berührt die WARME Heizplatte) eingestellt sind ...
Bsp. in Configuration.h:
// ROSTOCK MINI WOLFGANG HOTEND
#define DEFAULT_Kp 21.72
#define DEFAULT_Ki 1.52
#define DEFAULT_Kd 77.57
und:
#define DEFAULT_AXIS_STEPS_PER_UNIT {71.1111, 71.1111, 71.1111, 100}
Erst mal die Düse kalibieret (20x20x10 mit 0.5 mm Wandung) -> Wert Bsp. 0,56 mm in Slic3r Printer Settings / Advanced ... eintragen.
Danach Würfel gedruckt (20x20x10 wegen Tempratur und Material etc..) wegen Extruder -> Materialfluss nachschauen ob grob zu viel Material oder zu wenig.
Erst einmal egal was da rauskommt an Werten (19x19,2x9,8 mm wäre jetzt erst mal egal, erst mal weiterlesen, Jungs).
Danach habe ich mir speziellen 8-Kant gezeichnet (0°- 30°- 90°- 150°- 180°-210°- 270°- 330° ) SW 60 mm 3 mm hoch, SW 40 3mm hoch, SW 20 3mm hoch, Insgesamt 9 mm hoch und eine 10 mm Bohrung in der Mitte. (Kalibrierklotz werd ich endlich mal in Thingiverse posten .. trage ich nach, versprochen).
Die "X Schlüsselfläche ist erst mal eine Resultierende.
Wenn die Y Schlüsselfläche genau der Schlüsselfläche y -30 Grad und y + 30 Grad ist, dann gut, sonst müsst Ihr die Türme komplett nachjustieren um diese Differenz (Beispiel Turm X gut, Turm Y gut und Turm Z -0,2 mm Versatz. Somit schrauben auf und zwei lagen Papier a` 0,1 mm zwischen Platte und achter Welle gelegt. Wieder zusammenschrauben, Achtkant drucken bis es für euch Akzeptabel ist, Sch...Arbeit, ist mir bisher nix besseres eingefallen).
Sollte der Achtkant endlich an allen Schlüsselflächen eine Gleichmässigkeit von z.B. 59,8 mm /39,8mm / und 19,8 mm haben (Wenn der Versatz um je. 20 mm nicht ungefähr gleich Linear ist, habt ihr mit den Wert 71.1111 ein Problem) dann zieht ihr diesen Wert am
DELTA_SMOOTH_ROD_OFFSET 175 mm ergo -> 174.8 mm. (der Radiuswert ist formal der Richtige)
oder
DELTA_CARRIAGE_OFFSET 18 mm ergo -> 17.8 mm
(eigentlich auch egal wo, weil:
#define DELTA_RADIUS (DELTA_SMOOTH_ROD_OFFSET-DELTA_EFFECTOR_OFFSET-DELTA_CARRIAGE_OFFSET))
Dann ist euer Rostock kalibriert.
Nachtrag:
Sorry, wie die Max-Endstops einstellen also erst mal G28, dann:
G1 Y50 Z3 und 0,1 mm Schritte auf Z bis Papier an warmen Heizbett kratzt ,
Wert z.B 0,5 nachrichten an den "Z-Turm" danach
G1 Y-50 X-50 Z3 ebenso auf Z bis Papier kratzt, Ergebnis ebenso an den X-Turm Nachstellen. und zuletzt
G1 Y-50 X50 Z3 ebenso auf Z bis Papier kratzt, Y-Turm ... klar oder ..., -> bei M3 ist eine Umdrehung 0,5 mm Höhe.
Wurde grade gefragt, dachte das ist so selbstverständlich.
Have Fun
Angelo
3-mal bearbeitet. Zuletzt am 18.03.13 11:07.
|
Re: Rostock Problem 18. March 2013 10:31 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
|
Re: Rostock Problem 18. March 2013 11:44 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 18. March 2013 12:15 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 18. March 2013 12:29 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
|
Re: Rostock Problem 18. March 2013 12:30 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 308 |
|
Re: Rostock Problem 18. March 2013 12:58 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 1.807 |
Welche Jumper ???
Jungs, nichts für ungut, das wird ein langer Weg :-)
Ich vergas, die gepostete Firmware geht von einem Schrittmotor mit 200 Schritten und einer Teilung 1/16 Stepping Drivers (3200 Schritte pro Umdrehung) aus, ergo 3200 / (18Zähne xt2.5) = 71.1111
DELTA_SEGMENTS_PER_SECOND 200
Kleiner Tipp: Lest das prinzipiell erst mal durch:
[www.geneb.org]
[hardwired.cc] (unter Rostock-Mini suchen)
[reprap.org]
und hier noch:
[reprap.org]
Gib nie nie niemals auf!
Never, never, never give up
Zitat: Sir Winston Churchill
Als kleine Motivation für euch :-)
Ich hab jetzt genug geholfen und muss mich auf meine Arbeit konzentrieren.
Drücke euch fest die Daumen.
Have Fun Angelo
Jungs, nichts für ungut, das wird ein langer Weg :-)
Ich vergas, die gepostete Firmware geht von einem Schrittmotor mit 200 Schritten und einer Teilung 1/16 Stepping Drivers (3200 Schritte pro Umdrehung) aus, ergo 3200 / (18Zähne xt2.5) = 71.1111
DELTA_SEGMENTS_PER_SECOND 200
Kleiner Tipp: Lest das prinzipiell erst mal durch:
[www.geneb.org]
[hardwired.cc] (unter Rostock-Mini suchen)
[reprap.org]
und hier noch:
[reprap.org]
Gib nie nie niemals auf!
Never, never, never give up
Zitat: Sir Winston Churchill
Als kleine Motivation für euch :-)
Ich hab jetzt genug geholfen und muss mich auf meine Arbeit konzentrieren.
Drücke euch fest die Daumen.
Have Fun Angelo
|
Re: Rostock Problem 18. March 2013 13:05 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 1.323 |
|
Re: Rostock Problem 18. March 2013 14:47 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 1.807 |
|
Re: Rostock Problem 18. March 2013 21:23 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
Danke Leute !!! es funktioniert
was habe ich gemacht:
Jumper verbaut unter den Pololus (alle 3)
Firmware von angelo (Marlin-for-rostockmini-ramps1.4-lcd.zip) raufgespielt.
Testlauf = wollte beim Homing nach unten fahren
von "true" auf "false" geändert:
const bool X_ENDSTOPS_INVERTING = false
const bool Y_ENDSTOPS_INVERTING = false
const bool Z_ENDSTOPS_INVERTING = false
Testlauf = Homing funktionierte einwandfrei, manuelles Verfahren aber noch nicht.
Thermistor angeschlossen (Tipp von planlos)
Testlauf= Homing funktioniert, sowie manuelles verfahren.
Danke nochmal. Ich werde euch auf dem laufenden Halten.. Gute Nacht
was habe ich gemacht:
Jumper verbaut unter den Pololus (alle 3)
Firmware von angelo (Marlin-for-rostockmini-ramps1.4-lcd.zip) raufgespielt.
Testlauf = wollte beim Homing nach unten fahren
von "true" auf "false" geändert:
const bool X_ENDSTOPS_INVERTING = false
const bool Y_ENDSTOPS_INVERTING = false
const bool Z_ENDSTOPS_INVERTING = false
Testlauf = Homing funktionierte einwandfrei, manuelles Verfahren aber noch nicht.
Thermistor angeschlossen (Tipp von planlos)
Testlauf= Homing funktioniert, sowie manuelles verfahren.
Danke nochmal. Ich werde euch auf dem laufenden Halten.. Gute Nacht
|
Re: Rostock Problem 19. March 2013 00:49 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
|
Re: Rostock Problem 20. March 2013 04:25 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 20. March 2013 04:31 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
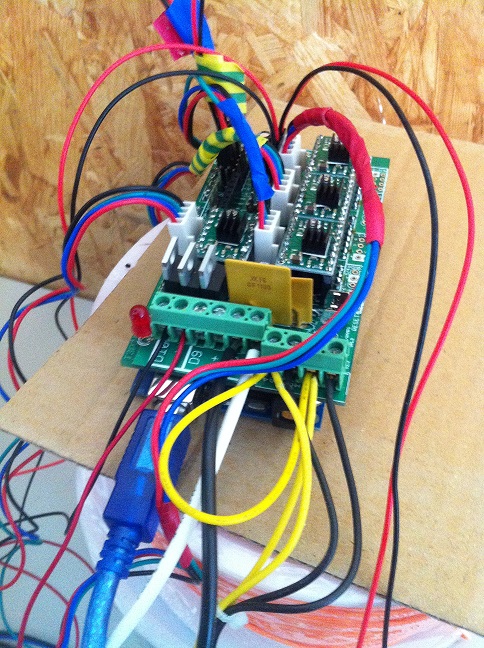
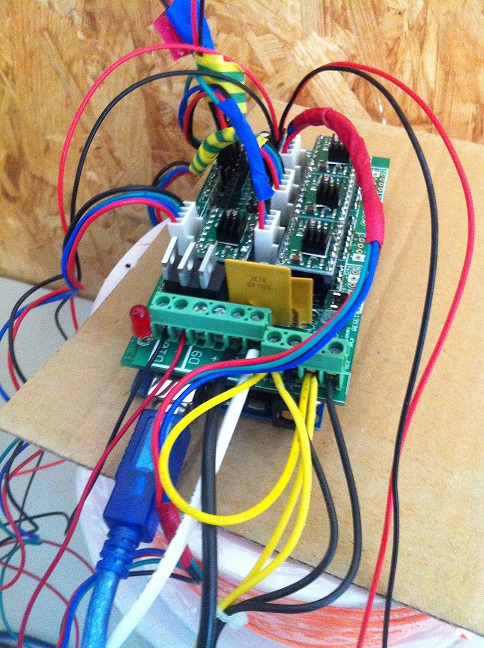
Ist unten links, bei der Einspeisung 11A und 5A angeklebt?
Leuchtet z.B. die LED (9) oben links, wenn du den Fan Lüfter steuerst?
Hast doch das Rampe 1.4 Board?
Ort: Berlin-Spandau, Kossel "Pro", Airtripper v3, BAM & DICE (1/32 Step) (200 Schritte pro mm), Stepper 42BYGH4803-04,Hexagon mit 40w, 0.4mm / 1.75mm, Windows 7, Repetier 1.x, jetzt RichCattell/Marlin 1.04 Firmware
Leuchtet z.B. die LED (9) oben links, wenn du den Fan Lüfter steuerst?
Hast doch das Rampe 1.4 Board?
Ort: Berlin-Spandau, Kossel "Pro", Airtripper v3, BAM & DICE (1/32 Step) (200 Schritte pro mm), Stepper 42BYGH4803-04,Hexagon mit 40w, 0.4mm / 1.75mm, Windows 7, Repetier 1.x, jetzt RichCattell/Marlin 1.04 Firmware
|
Re: Rostock Problem 20. March 2013 05:43 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 20. March 2013 05:53 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 62 |
Ich vermute, dass es ein software Problem ist. Die Firmware ist für das ramps 1.4 mit LCD.
Ort: Berlin-Spandau, Kossel "Pro", Airtripper v3, BAM & DICE (1/32 Step) (200 Schritte pro mm), Stepper 42BYGH4803-04,Hexagon mit 40w, 0.4mm / 1.75mm, Windows 7, Repetier 1.x, jetzt RichCattell/Marlin 1.04 Firmware
Ort: Berlin-Spandau, Kossel "Pro", Airtripper v3, BAM & DICE (1/32 Step) (200 Schritte pro mm), Stepper 42BYGH4803-04,Hexagon mit 40w, 0.4mm / 1.75mm, Windows 7, Repetier 1.x, jetzt RichCattell/Marlin 1.04 Firmware
|
Re: Rostock Problem 20. March 2013 09:20 |
Registrierungsdatum: 11 Jahre zuvor Beiträge: 15 |
|
Re: Rostock Problem 20. March 2013 10:53 |
Registrierungsdatum: 12 Jahre zuvor Beiträge: 1.133 |
Ramps 1.3 und 1.4 sind prinzipiell gleich, nur dass bei 1.4 SMD-Bauteile zum Einsatz kommen. Und das LCD lässt sich in der Firmware abschalten.
LG, Willy
3D gedruckter Messerschärfer +++ RADDS für den Arduino-Due +++ Meine Drucker
LG, Willy
3D gedruckter Messerschärfer +++ RADDS für den Arduino-Due +++ Meine Drucker

{kind=link}
{kind=link}
In diesem Forum dürfen leider nur registrierte Teilnehmer schreiben.