Motors necessary for a cubic meter printer based off D-bot
Posted by rodrigo
|
Motors necessary for a cubic meter printer based off D-bot July 04, 2017 03:33AM |
Registered: 6 years ago Posts: 11 |
Hi everyone,
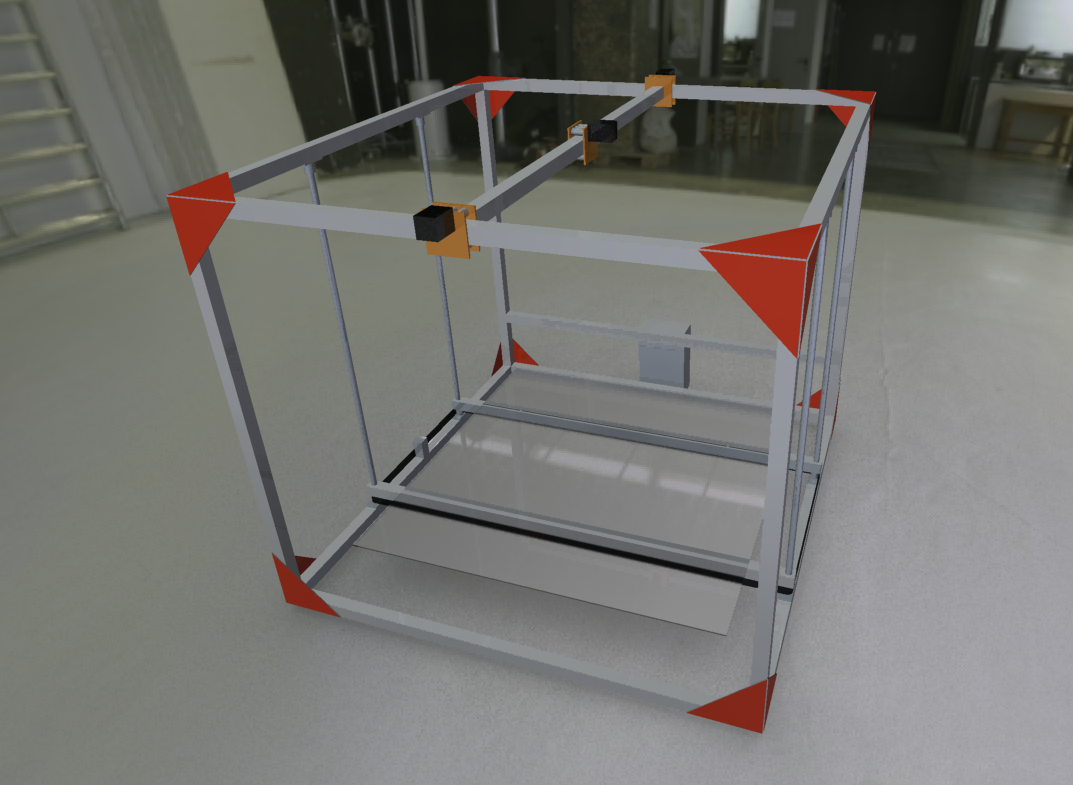
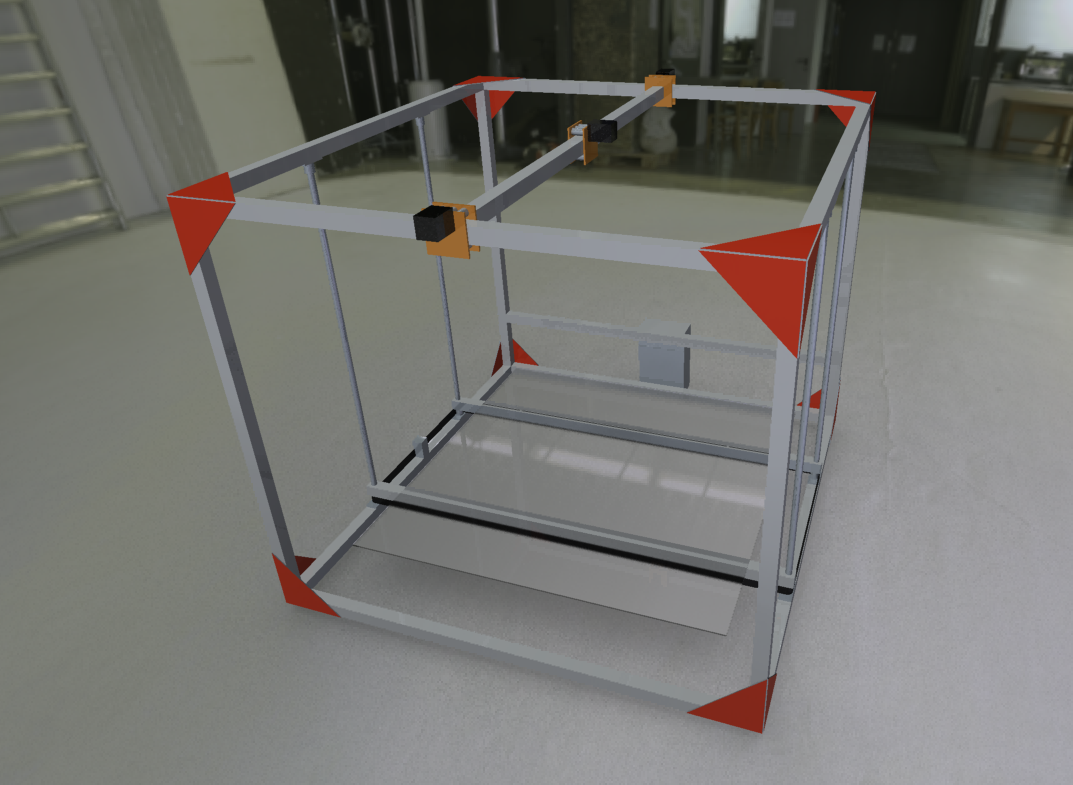
I am building a 1 cubic meter (1x1x1m) printer for research purposes WITHOUT an extruder and heated bed. Basically I am building a gantry with XYZ movement and an acrylic bed.
The plate moves up to 50 kg up and down with 4 lead screws powered by one (or two if necessary) NEMA 23 motor with a large timing belt around them in a rectangular shape with the motor's pulley attached straight to it (simplicity is of utmost importance). An aluminum frame is moved in the x axis via 2 motors and in the Y direction with one motor mounted on this same frame.
I have come across the D-bot electrical diagram here cdn.thingiverse.com/assets/15/31/5e/8b/3c/D-Bot_Electrical_Diagram.pdf and would like to modify it for simplicity without the heating elements and LED strip.
Basically the questions are, how do I modify the diagram (do I just remove the components I won't be needing?)? Do I still need a relay if I won't use a heating bed? Do I need to change anything other than the PSU to use these more powerful motors (NEMA 23 345 Oz.)?
Thanks for helping! As a mechanical engineer, my electronics knowledge is somewhat impaired.
Hopefully I can get a reply soon, I need to order the components tomorrow (I got this research opportunity just a few days ago )
)
Edited 1 time(s). Last edit at 07/04/2017 04:13AM by rodrigo.
I am building a 1 cubic meter (1x1x1m) printer for research purposes WITHOUT an extruder and heated bed. Basically I am building a gantry with XYZ movement and an acrylic bed.
The plate moves up to 50 kg up and down with 4 lead screws powered by one (or two if necessary) NEMA 23 motor with a large timing belt around them in a rectangular shape with the motor's pulley attached straight to it (simplicity is of utmost importance). An aluminum frame is moved in the x axis via 2 motors and in the Y direction with one motor mounted on this same frame.
I have come across the D-bot electrical diagram here cdn.thingiverse.com/assets/15/31/5e/8b/3c/D-Bot_Electrical_Diagram.pdf and would like to modify it for simplicity without the heating elements and LED strip.
Basically the questions are, how do I modify the diagram (do I just remove the components I won't be needing?)? Do I still need a relay if I won't use a heating bed? Do I need to change anything other than the PSU to use these more powerful motors (NEMA 23 345 Oz.)?
Thanks for helping! As a mechanical engineer, my electronics knowledge is somewhat impaired.
Hopefully I can get a reply soon, I need to order the components tomorrow (I got this research opportunity just a few days ago
)Edited 1 time(s). Last edit at 07/04/2017 04:13AM by rodrigo.
|
Re: Motors necessary for a cubic meter printer based off D-bot July 04, 2017 04:22AM |
Registered: 6 years ago Posts: 11 |
Ok it seems I'm basically building a CNC milling kit for 3D printer use (it will eventually have some extruder, just not a melting one) so I came across this amberspyglass.co.uk/wiki/EShapeoko_Complete_Kit however, it does not use RAMPS and I do need the functionality of RAMPS later on. How could I adapt that one to my design?
|
Re: Motors necessary for a cubic meter printer based off D-bot July 04, 2017 05:17AM |
Admin Registered: 13 years ago Posts: 7,000 |
this controller is basically the same as a ramps, minus the mosfet and thermistors, probably running grbl firmware (processor is a Atmel Atmega 328p vs a Atmel Atmega 2560, ie 2560 has more ram and rom)
To convert all you need to do is wire the steppers to some ramps type plugs and plug into a ramps with what ever firmware you want. even can use the same driver modules.
Edited 1 time(s). Last edit at 07/04/2017 05:19AM by Dust.
To convert all you need to do is wire the steppers to some ramps type plugs and plug into a ramps with what ever firmware you want. even can use the same driver modules.
Edited 1 time(s). Last edit at 07/04/2017 05:19AM by Dust.
|
Re: Motors necessary for a cubic meter printer based off D-bot July 04, 2017 05:27AM |
Admin Registered: 13 years ago Posts: 7,000 |
re larger steppers
You have to use stepper that can be driven by standard pololu modules (Pololu A4988, or Pololu DRV8825)
for anything larger, you have to use external stepper drivers, anything that uses the standard step,direction and enable can probably be used.. You simply remove the driver modules and use the step/dir and enable lines. (some external stepper drivers do require you to change the pulse width, as they can't respond to such quick pulses)
ie something like
NB this image contains an error, the +5v line needs to be plugged into vcc not +5v on that 3 pin connector
Edited 3 time(s). Last edit at 07/04/2017 05:33AM by Dust.
You have to use stepper that can be driven by standard pololu modules (Pololu A4988, or Pololu DRV8825)
for anything larger, you have to use external stepper drivers, anything that uses the standard step,direction and enable can probably be used.. You simply remove the driver modules and use the step/dir and enable lines. (some external stepper drivers do require you to change the pulse width, as they can't respond to such quick pulses)
ie something like

NB this image contains an error, the +5v line needs to be plugged into vcc not +5v on that 3 pin connector
Edited 3 time(s). Last edit at 07/04/2017 05:33AM by Dust.
|
Re: Motors necessary for a cubic meter printer based off D-bot July 04, 2017 09:42AM |
Registered: 6 years ago Posts: 11 |
Thanks a lot Dirt!
So I started checking the TB5650 drivers and they would be able to handle the 3A NEMAs.
If I understand right, there is nothing else that needs to be changed right? I just plug them to the ports where the Pololu drivers would have been.
Also, are they also good for 1.5A NEMA 17s? I decided for now to use those for the XY movement but still have the chance to later upgrade if necessary.
I will soon upload a fritzing diagram hoping it is correct.
So I started checking the TB5650 drivers and they would be able to handle the 3A NEMAs.
If I understand right, there is nothing else that needs to be changed right? I just plug them to the ports where the Pololu drivers would have been.
Also, are they also good for 1.5A NEMA 17s? I decided for now to use those for the XY movement but still have the chance to later upgrade if necessary.
I will soon upload a fritzing diagram hoping it is correct.
|
Re: Motors necessary for a cubic meter printer based off D-bot July 04, 2017 04:31PM |
Registered: 10 years ago Posts: 14,672 |
IMO, Arduino/RAMPS is a reasonable choice for small budget printers. But to get a good print quality from a printer with 1m^3 print volume you will have to spend a lot of money, and it doesn't make sense to use budget electronics in such systems. There are alternative (ore expensive) electronics solutions that will drive Nema 23 motors without having to use external drivers, and with additional benefits.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Motors necessary for a cubic meter printer based off D-bot July 05, 2017 01:49AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Motors necessary for a cubic meter printer based off D-bot July 05, 2017 03:43AM |
Registered: 6 years ago Posts: 11 |
Hmm ok then, I guess I can use 24V power. This is a project for my university so more expensive parts would also be ok, however one of the goals is to try and manage it as cheaply as possible to study the feasibility of building such a printer on a tighter budget. So far the only "crazy" requirements are lifting 50 kg (which is not even that much considering the Gigabot we have here has a 60x60x.7cm aluminum printer bed) and the size, but other than that I am basically moving lightweight rollers across a longer distance which can be easily achieved with NEMA 17s even.
I have also decided to use 2 NEMA 23s to lift the bed just to make sure. As you can see, the requirements are not that high, I just have longer travel distances.
I have also decided to use 2 NEMA 23s to lift the bed just to make sure. As you can see, the requirements are not that high, I just have longer travel distances.
|
Re: Motors necessary for a cubic meter printer based off D-bot July 05, 2017 04:23AM |
Registered: 6 years ago Posts: 11 |
So there are no RAMPS or TB6560 modules in fritzing, but basically I will use the diagram given by Dots to wire the motors, the first diagram I linked for wiring the endstops and fan, and this [reprappro.com] for wiring the second X movement motor.
Only one question remains, how do i know if my components are 24V compatible and how do >I make the change from 12V to 24V?
Only one question remains, how do i know if my components are 24V compatible and how do >I make the change from 12V to 24V?
|
Re: Motors necessary for a cubic meter printer based off D-bot July 05, 2017 09:52AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Motors necessary for a cubic meter printer based off D-bot July 05, 2017 10:21AM |
Registered: 6 years ago Posts: 11 |
I'm actually using a Taurino Power with a RAMPS Premium and they should be able to handle 24V [ooznest.co.uk] . I am ordering also a 24V 350W PSU [ooznest.co.uk] which I am not totally sure is necessary as I don't know what the rated voltage VDC/phase means (the NEMA 23s are 3.6V 3A and the 17s are 1.68A).
|
Re: Motors necessary for a cubic meter printer based off D-bot July 05, 2017 05:48PM |
Admin Registered: 13 years ago Posts: 7,000 |
|
Re: Motors necessary for a cubic meter printer based off D-bot August 22, 2017 12:44PM |
Registered: 6 years ago Posts: 14 |
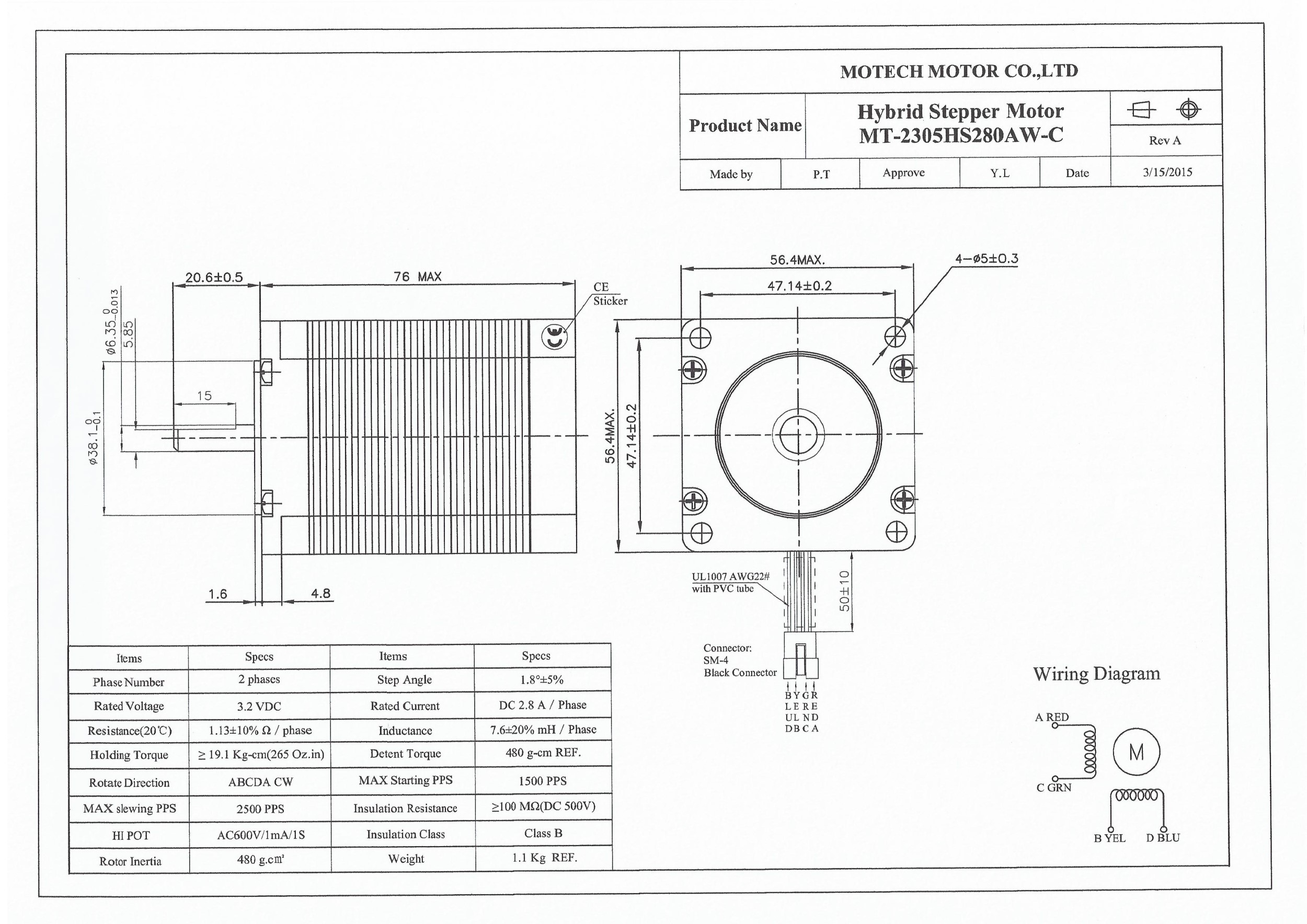
Hello, so given what has been said before, would a 24 VDC psu be sufficient for a Nema23 stepper such as the one attached?
If not, what are the options if one wants to use Nema23 steppers powered at 36V? Would the Taurino Power + Ramps Premium or the RUMBA board be the only 2 options or is there a simple way to make this work with a MegatronicsV3 or a Arduino Due + RADDS shield for example?
If not, what are the options if one wants to use Nema23 steppers powered at 36V? Would the Taurino Power + Ramps Premium or the RUMBA board be the only 2 options or is there a simple way to make this work with a MegatronicsV3 or a Arduino Due + RADDS shield for example?
|
Re: Motors necessary for a cubic meter printer based off D-bot August 22, 2017 05:37PM |
Registered: 10 years ago Posts: 14,672 |
The voltage you need to drive stepper motors depends on the speed you want to run them at. Even 6V would be enough to drive those motors at low speeds. To calculate the supply voltage required, see [duet3d.com].
If you calculate that 24V is enough, then a Duet WiFi or Duet Ethernet would be a good match for those 2.8A Nema 23 motors without needing external drivers.
Edited 1 time(s). Last edit at 08/22/2017 05:38PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
If you calculate that 24V is enough, then a Duet WiFi or Duet Ethernet would be a good match for those 2.8A Nema 23 motors without needing external drivers.
Edited 1 time(s). Last edit at 08/22/2017 05:38PM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Motors necessary for a cubic meter printer based off D-bot August 23, 2017 06:34AM |
Registered: 6 years ago Posts: 14 |
Thank you for the link, I'll make the necessary calculations 
How easy is it to set up external stepper drivers to these boards? What if I wanted to use an integrated stepper such as this one: Integratedsteppeonline
Edited 1 time(s). Last edit at 08/23/2017 08:45AM by yala.
How easy is it to set up external stepper drivers to these boards? What if I wanted to use an integrated stepper such as this one: Integratedsteppeonline
Edited 1 time(s). Last edit at 08/23/2017 08:45AM by yala.
|
Re: Motors necessary for a cubic meter printer based off D-bot August 23, 2017 11:31AM |
Registered: 10 years ago Posts: 14,672 |
Quote
yala
Thank you for the link, I'll make the necessary calculations
How easy is it to set up external stepper drivers to these boards? What if I wanted to use an integrated stepper such as this one: Integratedsteppeonline
It's straightforward to connect up to 7 external stepper drivers if they accept 3.3V control signals. Most stepper driver modules do even if they are advertised as 5V (perhaps because 5V TTL-level signals don't guarantee more than 2.4V anyway). You still get to keep the 5 built-in drivers.
That integrated stepper motor you linked to accepts STEP/DIR signals (the web page calls it PUL/DIR), so it should be compatible.
Edited 2 time(s). Last edit at 08/23/2017 11:33AM by dc42.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Motors necessary for a cubic meter printer based off D-bot August 23, 2017 03:29PM |
Registered: 6 years ago Posts: 14 |
OK thank you great. What if I want closed loop steppers or hybrid servomotor with a built-in encoder?? Like this one: Closed-Loop-Stepper_Stepperonline.com
Is it possible to incorporate this on a Duet Wifi/Ethernet? that would be fantastic
Is it possible to incorporate this on a Duet Wifi/Ethernet? that would be fantastic
|
Re: Motors necessary for a cubic meter printer based off D-bot August 24, 2017 02:14AM |
Registered: 10 years ago Posts: 14,672 |
The webpage says it has "Isolated control inputs of Pulse, Direction and Enable". So it is compatible. At worst you might have to level shift the signals to 5V, but probably not.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Motors necessary for a cubic meter printer based off D-bot August 24, 2017 05:18AM |
Registered: 6 years ago Posts: 14 |
Yes it does say that they accept 5V to 24V command signals, so I guess it would be necessary to shift the signal to 5V.
What about the position PEND and alarm ALM signals ? These are not usually present in a normal open loop stepper so how would they fit the Duet stepper driver ports?
(sorry for the dumb questions and thank you for your patience)
What about the position PEND and alarm ALM signals ? These are not usually present in a normal open loop stepper so how would they fit the Duet stepper driver ports?

{kind=link}
{kind=link}
{kind=link}
{kind=link}
(sorry for the dumb questions and thank you for your patience)
|
Re: Motors necessary for a cubic meter printer based off D-bot August 24, 2017 01:48PM |
Registered: 10 years ago Posts: 14,672 |
Unfortunately the link to the manual for that motor doesn't work, so I can only guess at what the PEND and ALM signals are for. At a guess, ALM is an alarm output that signals that something is wrong. If so then it could be connected to a spare endstop input on the Duet which can trigger a user defined macro file, for example to pause the print.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Motors necessary for a cubic meter printer based off D-bot August 29, 2017 10:58AM |
Registered: 6 years ago Posts: 11 |
Hello again guys,
So I finally got quite far with the printer and most components have arrived.
Right now I have the gantry built and am testing the motors but I have two issues as of now.
First, the steppers heat up quite a lot and really fast (maybe 60 degrees in 5 seconds) and I suspect it might have to do with the PSU being 24V. I adjusted the stepper current knobs beforehand to be half the rated current of the motors (around .84) and i have 2 in series for Y and Z; X only has one.
The second thing I am worried about is a super-high pitched sound coming from the Y-motors after I move them a few centimeters. It is not too loud but it is annoying and worrisome. It is also annoying that no one other than me here can hear it due to it being such a high frequency.
It seems there are a ton of problems arising from endstop settings in Marlin, but would this be the reason why?
So I finally got quite far with the printer and most components have arrived.
Right now I have the gantry built and am testing the motors but I have two issues as of now.
First, the steppers heat up quite a lot and really fast (maybe 60 degrees in 5 seconds) and I suspect it might have to do with the PSU being 24V. I adjusted the stepper current knobs beforehand to be half the rated current of the motors (around .84) and i have 2 in series for Y and Z; X only has one.
The second thing I am worried about is a super-high pitched sound coming from the Y-motors after I move them a few centimeters. It is not too loud but it is annoying and worrisome. It is also annoying that no one other than me here can hear it due to it being such a high frequency.
It seems there are a ton of problems arising from endstop settings in Marlin, but would this be the reason why?
|
Re: Motors necessary for a cubic meter printer based off D-bot December 26, 2019 10:27AM |
Admin Registered: 11 years ago Posts: 3,096 |
These are two very old threads that you're 'resurrecting'. I do not know if the original posters will reply.Quote
adomanim
Do you have a feel for your BOM cost, and are you using premium stuff like Duet and genuine extruder/hotend parts?
http://www.marinusdebeer.nl/
Sorry, only registered users may post in this forum.