Tri-Polar Bot Concept -- Meet Wally
Posted by see3d
|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 11:37AM |
Registered: 11 years ago Posts: 979 |
@Vladimir_Lukashuk: I didn't put the logo on the bent arm because it would be off center. I didn't put it on the arm with the hot end mount because it would break the symmetry. However, if you would like to match my branding, I use the Ubuntu font. I cut the name in 1mm at a 45 degree angle.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 11:39AM |
Registered: 11 years ago Posts: 979 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 03:58PM |
Registered: 11 years ago Posts: 979 |

|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 05:08PM |
Registered: 10 years ago Posts: 25 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 05:24PM |
Registered: 11 years ago Posts: 979 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 09:03PM |
Registered: 10 years ago Posts: 167 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 09:07PM |
Registered: 11 years ago Posts: 1,049 |

|
Re: Tri-Polar Bot Concept -- Meet Wally October 18, 2013 11:47PM |
Registered: 11 years ago Posts: 979 |
@AbuMaia: With solid infill we are sitting at 1.45L of plastic which is about 2kg of plastic. I haven't had the time to collect the actual volumes after I slice them with low infill.
@cozmicray: You have a few options. You can go to the root. On the right you will see "Download ZIP." Alternatively, you can clone the whole repo or just a folder using a GIT client such as TortoiseGit.
ipt, idw, iam: Inventor Files
iges, sat, step, stl: Various 3D file formats. STL is what most will want. I had some requests for STEP files. Some of these formats don't convert the surfaces to triangles and keep them as NURBS which is super cool.
dxf: These are 2D files for people with mills and lasers. Note: I am still populating this folder.
@cozmicray: You have a few options. You can go to the root. On the right you will see "Download ZIP." Alternatively, you can clone the whole repo or just a folder using a GIT client such as TortoiseGit.
ipt, idw, iam: Inventor Files
iges, sat, step, stl: Various 3D file formats. STL is what most will want. I had some requests for STEP files. Some of these formats don't convert the surfaces to triangles and keep them as NURBS which is super cool.
dxf: These are 2D files for people with mills and lasers. Note: I am still populating this folder.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 02:39AM |
Registered: 10 years ago Posts: 25 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 04:04AM |
Registered: 11 years ago Posts: 979 |
@Vladimir_Lukashuk: Short answer: don't worry about it.
I could probably make the quality better but it would be for not. I wish I had the time to do the math but I can assure you that this won't even be close to the number one source of error. BTW, the nature of printing an inset perimeter of non-zero thickness will effectively smooth the surface. If anyone has the time and the ability, I am curious what the theoretical error is for this.
Now for the real reason it doesn't matter: Your print won't be good enough to notice this effect. There are so many factors that change your print from layer to layer so you would be incredibly lucky if your printing was good enough to be able to measure an effect over all the other static.
Now for the real solution: Tighten a bolt and a nut onto the pulley. Chuck it up in a hand drill. Use increasingly fine grit sandpaper to smooth the surface to a near perfect circle. (A lathe is really the main way to make sure you have a true circle so the sandpaper and the drill is a bit of a hack.)
On a side note: I think one problem that a lot of other RepRap builders and designers do is premature optimization. There are many threads on this forum that discuss minimizing sources of errors that are already small or don't really exist. If I was bolder, I would post "FINGERNAILS!" IMHO, going to this much trouble would be like putting low profile door handles on a car to make it go faster or like cutting your fingernails as a way to loss weight. (I measure before and after every time and I have never gotten a statistically significant delta. :-))
Sorry Vladimir_Lukashuk! I got on a rant that had little to do with your question and request. I attached the high resolution version of the pulley for fun. I don't want to put it in the repo because I think it is too big. I challenge you to a fun experiment. If you have a big enough printer, print the high and low resolution version at the same time. Get someone else to shuffle them around so you don't know which one is which. Try not to pay attention to your printer at all during the print because there are some audio clues that will set them apart. After they are done, see if you can tell them apart.
BTW, STL's can get quite big even at low resolution. I have a long term goal of making a NURBS slicing program. We would need to use formats such as IGES, STEP, or SAT instead of STL. Why? If you listen to a printer going around a circle you can hear many distinct tones instead of a smooth tone change. Crap in, crap out. Gcode in its current state would not be able to handle the job because we would need to send splines to the printer instead of a series of straight line segments. (That would be a lot of work just to make my printer sound smoother.)
Edited 3 time(s). Last edit at 10/19/2013 04:08AM by nicholas.seward.
I could probably make the quality better but it would be for not. I wish I had the time to do the math but I can assure you that this won't even be close to the number one source of error. BTW, the nature of printing an inset perimeter of non-zero thickness will effectively smooth the surface. If anyone has the time and the ability, I am curious what the theoretical error is for this.
Now for the real reason it doesn't matter: Your print won't be good enough to notice this effect. There are so many factors that change your print from layer to layer so you would be incredibly lucky if your printing was good enough to be able to measure an effect over all the other static.
Now for the real solution: Tighten a bolt and a nut onto the pulley. Chuck it up in a hand drill. Use increasingly fine grit sandpaper to smooth the surface to a near perfect circle. (A lathe is really the main way to make sure you have a true circle so the sandpaper and the drill is a bit of a hack.)
On a side note: I think one problem that a lot of other RepRap builders and designers do is premature optimization. There are many threads on this forum that discuss minimizing sources of errors that are already small or don't really exist. If I was bolder, I would post "FINGERNAILS!" IMHO, going to this much trouble would be like putting low profile door handles on a car to make it go faster or like cutting your fingernails as a way to loss weight. (I measure before and after every time and I have never gotten a statistically significant delta. :-))
Sorry Vladimir_Lukashuk! I got on a rant that had little to do with your question and request. I attached the high resolution version of the pulley for fun. I don't want to put it in the repo because I think it is too big. I challenge you to a fun experiment. If you have a big enough printer, print the high and low resolution version at the same time. Get someone else to shuffle them around so you don't know which one is which. Try not to pay attention to your printer at all during the print because there are some audio clues that will set them apart. After they are done, see if you can tell them apart.
BTW, STL's can get quite big even at low resolution. I have a long term goal of making a NURBS slicing program. We would need to use formats such as IGES, STEP, or SAT instead of STL. Why? If you listen to a printer going around a circle you can hear many distinct tones instead of a smooth tone change. Crap in, crap out. Gcode in its current state would not be able to handle the job because we would need to send splines to the printer instead of a series of straight line segments. (That would be a lot of work just to make my printer sound smoother.)
Edited 3 time(s). Last edit at 10/19/2013 04:08AM by nicholas.seward.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 07:04AM |
Registered: 10 years ago Posts: 86 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 10:57AM |
Registered: 10 years ago Posts: 167 |
magicworx Wrote:
-------------------------------------------------------
> Added feature after building.
>
> Calibration run plays music.
> homing plays another music.
>
> With the sound of the steppers.
>
> Question: is that a new music genre? Stepper
> sound!
No reason it shouldn't work. [www.youtube.com] - [www.youtube.com]
Edited 1 time(s). Last edit at 10/19/2013 10:59AM by AbuMaia.
-------------------------------------------------------
> Added feature after building.
>
> Calibration run plays music.
> homing plays another music.
>
> With the sound of the steppers.
>
> Question: is that a new music genre? Stepper
> sound!
No reason it shouldn't work. [www.youtube.com] - [www.youtube.com]
Edited 1 time(s). Last edit at 10/19/2013 10:59AM by AbuMaia.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 02:59PM |
Registered: 11 years ago Posts: 48 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 03:34PM |
Registered: 10 years ago Posts: 62 |
nicholas.seward Wrote:
-------------------------------------------------------
> I have a long term goal of making a NURBS slicing program. We
> would need to use formats such as IGES, STEP, or SAT instead of STL.
I am totally on-board with this, and it's one of the big reasons I have switched to printing with LinuxCNC instead of the conventional controllers. In addition to programmable support for non-trivial kinematics, LinuxCNC has support for NURBS. I'm still working on some of the lower-level nitty-gritty details to get LinuxCNC working smoothly for printing (and hopefully gain wider adoption), but NURBS support is definitely on the radar. AFAIK, the biggest missing piece is the tool-chain, specifically a slicing program.
Edited 1 time(s). Last edit at 10/19/2013 03:36PM by cdsteinkuehler.
-------------------------------------------------------
> I have a long term goal of making a NURBS slicing program. We
> would need to use formats such as IGES, STEP, or SAT instead of STL.
I am totally on-board with this, and it's one of the big reasons I have switched to printing with LinuxCNC instead of the conventional controllers. In addition to programmable support for non-trivial kinematics, LinuxCNC has support for NURBS. I'm still working on some of the lower-level nitty-gritty details to get LinuxCNC working smoothly for printing (and hopefully gain wider adoption), but NURBS support is definitely on the radar. AFAIK, the biggest missing piece is the tool-chain, specifically a slicing program.
Edited 1 time(s). Last edit at 10/19/2013 03:36PM by cdsteinkuehler.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 07:04PM |
Registered: 11 years ago Posts: 979 |
@sgraber: Here is an early print. (I think it is my 2nd ever but I am not sure.)
This print is using uncalibrated settings, dirty filament, poorly tensioned string, bad filament drive, and 1:7 mechanical advantage instead of the new 1:10. Considering that TSA broke Wally the day before and I had to hacksaw some chunks off Wally hours before in the hotel room, this is an amazing print.
I have only had Wally back from NY for about 1 week. I have the pieces printed for 4 more sitting in from of me. I will be able to find time this next week to tune Wally up and get some show pieces.
@Everyone: I accidentally uploaded the STLs with cm being the default unit. I have now switched them over to mm.
Edited 2 time(s). Last edit at 10/19/2013 07:06PM by nicholas.seward.

This print is using uncalibrated settings, dirty filament, poorly tensioned string, bad filament drive, and 1:7 mechanical advantage instead of the new 1:10. Considering that TSA broke Wally the day before and I had to hacksaw some chunks off Wally hours before in the hotel room, this is an amazing print.
I have only had Wally back from NY for about 1 week. I have the pieces printed for 4 more sitting in from of me. I will be able to find time this next week to tune Wally up and get some show pieces.
@Everyone: I accidentally uploaded the STLs with cm being the default unit. I have now switched them over to mm.
Edited 2 time(s). Last edit at 10/19/2013 07:06PM by nicholas.seward.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 10:13PM |
Registered: 11 years ago Posts: 58 |
A quick hint for those diving in. . . the arms with bearing cutouts on the ends will want to curl very badly. Blue tape isn't good enough, even with a brim. In order to get them to stay flat we upgraded our printer with 4 mm glass over a heated bed and run it at 70 C first layer, 65 for the rest of the print, a wash of PVAc glue, a nice solid first layer (not overly squishy, but no gaps) and a 10 mm brim.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 19, 2013 11:25PM |
Registered: 11 years ago Posts: 1,049 |

|
Re: Tri-Polar Bot Concept -- Meet Wally October 20, 2013 02:26AM |
Registered: 10 years ago Posts: 25 |
Nicolas! You to me recommended to make experiment - the press at the same time 2 with the different permission. Here result - edges are visible in both (it doesn't transfer a photo or it is necessary to choose a foreshortening) hands accurately feeling. However you are right, quality of the press forces both disks to grind an emery paper. Still it is necessary to be played with settings of a slayser.
That the detail didn't come off I put on a bed Cyanoacrylate glue( Attention! It is POISON! ! ! !), temperature of a bed or environment of 30-40 degrees Celsius
Edited 2 time(s). Last edit at 10/20/2013 03:14AM by Vladimir_Lukashuk.
That the detail didn't come off I put on a bed Cyanoacrylate glue( Attention! It is POISON! ! ! !), temperature of a bed or environment of 30-40 degrees Celsius
Edited 2 time(s). Last edit at 10/20/2013 03:14AM by Vladimir_Lukashuk.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 20, 2013 11:27AM |
Registered: 10 years ago Posts: 1,381 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 20, 2013 11:43AM |
Registered: 10 years ago Posts: 25 |
Nicolas! You created an excellent thing! There is nothing ideal. Likely it it is possible and it is necessary to improve, but it absolutely another.
And a set in the course of the press. And I thank, you, for that that, you do! To impart the knowledge, skills and experience by another, to create something for the benefit of mankind is a gift from God. Let It will be always with you.
Forgive for my English, I think that you understand an essence.
And a set in the course of the press. And I thank, you, for that that, you do! To impart the knowledge, skills and experience by another, to create something for the benefit of mankind is a gift from God. Let It will be always with you.
Forgive for my English, I think that you understand an essence.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 20, 2013 11:54PM |
Registered: 10 years ago Posts: 25 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 21, 2013 02:34PM |
Registered: 10 years ago Posts: 10 |
Nicholas -
Since you were kind enough to do your modeling in Inventor (we have a few seats) I went ahead and forked your repository and cloned a copy here at work. We had a ball playing with the Wally model at lunch time today, and are seriously considering building one.
One question came up about the backboard, there are some grooves on the back, is there a purpose for them or are they a design leftover?
Cheers and Kudos!
Since you were kind enough to do your modeling in Inventor (we have a few seats) I went ahead and forked your repository and cloned a copy here at work. We had a ball playing with the Wally model at lunch time today, and are seriously considering building one.
One question came up about the backboard, there are some grooves on the back, is there a purpose for them or are they a design leftover?
Cheers and Kudos!
|
Re: Tri-Polar Bot Concept -- Meet Wally October 21, 2013 03:09PM |
Registered: 11 years ago Posts: 48 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 21, 2013 07:48PM |
Registered: 10 years ago Posts: 167 |
|
Re: Tri-Polar Bot Concept -- Meet Wally October 22, 2013 09:37PM |
Registered: 11 years ago Posts: 979 |
@smooshed: The grooves are for wires. I actually need to make them a bit deeper.
@sgraber: I have no experience with a JHead but I think they mount the same. If not, there is not much to modify.
If someone would be kind enough to send me some JHeads I would love to provide support for them. :-)
@sgraber: I have no experience with a JHead but I think they mount the same. If not, there is not much to modify.
If someone would be kind enough to send me some JHeads I would love to provide support for them. :-)
|
Re: Tri-Polar Bot Concept -- Meet Wally October 24, 2013 11:07AM |
Registered: 10 years ago Posts: 1,381 |

Modify Wally to take advantage of a larger print envelope like DexTAR.
You will attract more sales.
Less they are patenting the device?
I prefer that the larger print envelope to be the initial release on KickStarter!
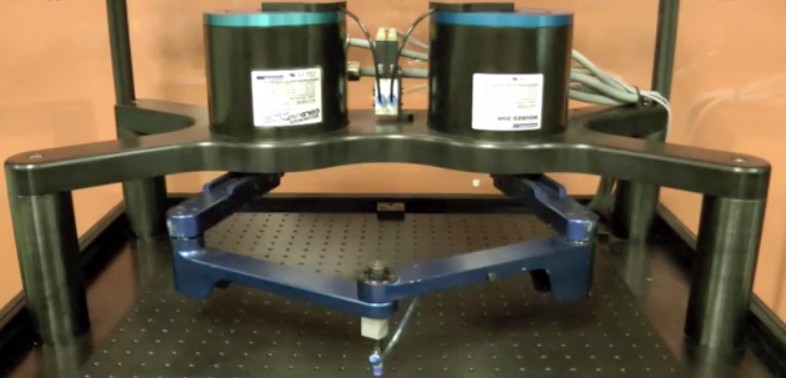
Video:
[www.youtube.com]
[www.youtube.com]
[www.youtube.com]
Paper:
[etsmtl.ca]
The controller is an old PC running MathWorks' xPC Target and with a Quanser's Q8 card. The controller was programmed in Simulink. The control law is Computed Torque. The sampling time is 1 ms. The motor drives are the one sold with the direct-drive motors.
A2
Edited 2 time(s). Last edit at 10/24/2013 03:14PM by A2.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 24, 2013 11:58AM |
Registered: 11 years ago Posts: 979 |
@A2: Ilian Bonev will have to verify but I believe this would be a poor choice for a 3D printer.
Wally's design keeps all singularities out of the working volume. The DexTAR has many singularities. You can have singularities as long as you have a very smart control scheme to let momentum carry it through each in a predictable way. We aren't quite that sophisticated. Yet.
A big difference here is they are driving the shoulders and I am driving the elbows.
Also keep in mind that Wally had a goal of being wall mountable.
To be clear, a DexTAR-like bot could be made into a 3D printer. Concerns you would have to address that we have already solved on Wally... 1) singularities 2) resolution 3) z 4) plastic filament routing
Wally's design keeps all singularities out of the working volume. The DexTAR has many singularities. You can have singularities as long as you have a very smart control scheme to let momentum carry it through each in a predictable way. We aren't quite that sophisticated. Yet.
A big difference here is they are driving the shoulders and I am driving the elbows.
Also keep in mind that Wally had a goal of being wall mountable.
To be clear, a DexTAR-like bot could be made into a 3D printer. Concerns you would have to address that we have already solved on Wally... 1) singularities 2) resolution 3) z 4) plastic filament routing
|
Re: Tri-Polar Bot Concept -- Meet Wally October 24, 2013 12:19PM |
Registered: 10 years ago Posts: 1,381 |
I was envisioning adding 2 more steppers at the shoulder joint, that's in addition to the 2 steppers that you have driving the elbows.
DexTAR steppers are located at the shoulder joint, your steppers are also presently located at the shoulder joints.
For example: you would have Walleys steppers mounted directly on top of another stepper motor at the shoulder joint.
The top metal plate would be removed.
The steppers would be mounted to either side of the back plate (i.e. wall, wally).
The shoulder joint separation (i.e. distance apart) is optimized to avoid singularities.
It would print longer in one direction than the other.
The two additional steppers would give you the muscle to move through the singularities.
I'm not sure if the software would need to be "smarter" or tricks added to the software with the additional steppers to account for the singularities.
A2
Edited 1 time(s). Last edit at 10/24/2013 12:20PM by A2.
DexTAR steppers are located at the shoulder joint, your steppers are also presently located at the shoulder joints.
For example: you would have Walleys steppers mounted directly on top of another stepper motor at the shoulder joint.
The top metal plate would be removed.
The steppers would be mounted to either side of the back plate (i.e. wall, wally).
The shoulder joint separation (i.e. distance apart) is optimized to avoid singularities.
It would print longer in one direction than the other.
The two additional steppers would give you the muscle to move through the singularities.
I'm not sure if the software would need to be "smarter" or tricks added to the software with the additional steppers to account for the singularities.
A2
Edited 1 time(s). Last edit at 10/24/2013 12:20PM by A2.
|
Re: Tri-Polar Bot Concept -- Meet Wally October 24, 2013 11:26PM |
Registered: 10 years ago Posts: 100 |
A2, That is not a Wally. It is a DexTAR. They don't operate on the same principle. If you want a larger print area, then print a bigger Wally. I have a 12 x 16 inch RigidBot Big on order. I will only use it for big stuff. It will take too much energy for the giant heated bed to make smaller stuff. With Wally, I would expect to be able to print most of the normal sized stuff. It will also fit on my side desk and the other one will have to go into the basement because it is so big. It does not always make sense to have a larger print area.
What is your idea of the ideal print envelope for a general purpose desktop 3D printer?
What is your idea of the ideal print envelope for a general purpose desktop 3D printer?
|
Re: Tri-Polar Bot Concept -- Meet Wally October 25, 2013 03:11AM |
Registered: 15 years ago Posts: 401 |
A2 Wrote:
-------------------------------------------------------
> I was envisioning adding 2 more steppers at the
> shoulder joint, that's in addition to the 2
> steppers that you have driving the elbows.
> DexTAR steppers are located at the shoulder joint,
> your steppers are also presently located at the
> shoulder joints.
The point of Wally and Simpson is that they are simple geometries (with complex inverse kinematics).
Why do you want to create a 3-DOF bot that requires 5 actuators? The increases the cost of the bot by a lot, especially since it requires nonstandard electronics with 6 stepper drivers, not to mention the extra two steppers.
And what's wrong with Wally's print area? If it's too small for you, you should look at Morgan. Morgan has no singularities--other than the one that runs the hot-end into the central support.
-------------------------------------------------------
> I was envisioning adding 2 more steppers at the
> shoulder joint, that's in addition to the 2
> steppers that you have driving the elbows.
> DexTAR steppers are located at the shoulder joint,
> your steppers are also presently located at the
> shoulder joints.
The point of Wally and Simpson is that they are simple geometries (with complex inverse kinematics).
Why do you want to create a 3-DOF bot that requires 5 actuators? The increases the cost of the bot by a lot, especially since it requires nonstandard electronics with 6 stepper drivers, not to mention the extra two steppers.
And what's wrong with Wally's print area? If it's too small for you, you should look at Morgan. Morgan has no singularities--other than the one that runs the hot-end into the central support.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.