Double Arm flying extruder.
Posted by clearlynotstefan
|
Double Arm flying extruder. September 05, 2017 10:40PM |
Registered: 7 years ago Posts: 154 |
So I pitched this crazy idea in the duet subforum because the original iteration needed firmware to play nice, but it lead me to consider a simpler form that should work pretty well too I think. I'm a big fan of flying extruders on taller deltas to avoid the retraction issues that follow a long bowden tube, my current set up has my extruder suspended from the carriages by balloon animal balloons and works quite well. Still, if you've ever watched honeycomb infill shake an extruder you'd know a flying extruder is dampening the motion generated by the weight of the extruder, but it's still certainly moving some mass around at a point where I don't really want momentum moving mass.
So I pitched 2 ideas, one simpler but less beneficial than the other, the second being extra complicated and expensive but providing some benefit.
1) Double arm carriages. An extra tall delta carriage with 2 tiers of arms separated vertically by a few inches. The two set of arms are identical, the lower arms connected to your effector as usual, the upper arms connecting to an "extruder effector" that has the extruder secured. As long as the spacing and arm length is the same, the extruder will be moved in unison with the effector, allowing a very short bowden tube to be used. True it makes the mass at the carriages much higher, but it creates little to no momentum mass at the hotend. I don't think the carriages or steppers mind carrying the weight at the carriages. The carriages are where the machine is strongest, the effector is where it is weakest. This moves the force required to move an extruder from weak to strong and frees the hotend arms and effector from carrying the weight for purposes of momentum.
2) Double delta. I use open builds vslot and wheels. I was considering originally mounting a second set of carriages, steppers, and belts on the outside face of the extrusion. Completely different drive systems 2 steppers for tower, one moving the effector the other moving the extruder effector. Printed pieces can bring the arms back around the front and align them with arms of the real forward facing carriages (just higher). The rest of the plan is the same. The firmware mirrors the actions of the real steppers on the secondary extruder steppers.
Both overkill for addressing a moving mass problem that doesn't actually affect my prints, but hey this is reprap, crazy ideas are fun.
Thoughts?
So I pitched 2 ideas, one simpler but less beneficial than the other, the second being extra complicated and expensive but providing some benefit.
1) Double arm carriages. An extra tall delta carriage with 2 tiers of arms separated vertically by a few inches. The two set of arms are identical, the lower arms connected to your effector as usual, the upper arms connecting to an "extruder effector" that has the extruder secured. As long as the spacing and arm length is the same, the extruder will be moved in unison with the effector, allowing a very short bowden tube to be used. True it makes the mass at the carriages much higher, but it creates little to no momentum mass at the hotend. I don't think the carriages or steppers mind carrying the weight at the carriages. The carriages are where the machine is strongest, the effector is where it is weakest. This moves the force required to move an extruder from weak to strong and frees the hotend arms and effector from carrying the weight for purposes of momentum.
2) Double delta. I use open builds vslot and wheels. I was considering originally mounting a second set of carriages, steppers, and belts on the outside face of the extrusion. Completely different drive systems 2 steppers for tower, one moving the effector the other moving the extruder effector. Printed pieces can bring the arms back around the front and align them with arms of the real forward facing carriages (just higher). The rest of the plan is the same. The firmware mirrors the actions of the real steppers on the secondary extruder steppers.
Both overkill for addressing a moving mass problem that doesn't actually affect my prints, but hey this is reprap, crazy ideas are fun.
Thoughts?
|
Re: Double Arm flying extruder. September 06, 2017 12:21AM |
Registered: 9 years ago Posts: 978 |
I don't think it matters whether the extruder is physically connected to the effector or not. If it is physically connected to the carriages or extruder by inelastic links, then it's mass is part of the moving mass being driven by the steppers, and the momentum of the system will be the same.
You're on the right track with your balloons; what's needed is an *elastic* connection to the extruder and/or carriages, so that the extruder can move more slowly than the effector, but still be in reasonable proximity. So the linkages will need to essentially filter the motion of the extruder, absorbing high frequencies and passing low frequencies. Think of something like the shock absorber/spring mechanism in a car's suspension which does the same thing.
Your "double delta" idea would allow the same kind of thing in software, doing on-the-fly digital filtering of the motion commands so that the extruder stays within some specified distance of the hot-end position. Or software could pre-calculate the motion of the extruder to keep it within bounds of speed and acceleration and distance from the hot-end. Effectively, this would "tune" your suspension to each object being printed.
You're on the right track with your balloons; what's needed is an *elastic* connection to the extruder and/or carriages, so that the extruder can move more slowly than the effector, but still be in reasonable proximity. So the linkages will need to essentially filter the motion of the extruder, absorbing high frequencies and passing low frequencies. Think of something like the shock absorber/spring mechanism in a car's suspension which does the same thing.
Your "double delta" idea would allow the same kind of thing in software, doing on-the-fly digital filtering of the motion commands so that the extruder stays within some specified distance of the hot-end position. Or software could pre-calculate the motion of the extruder to keep it within bounds of speed and acceleration and distance from the hot-end. Effectively, this would "tune" your suspension to each object being printed.
|
Re: Double Arm flying extruder. September 06, 2017 12:27AM |
Registered: 7 years ago Posts: 154 |
Yeah I'm sure the double delta idea would work well, but its a lot of work and money to fix a problem that doesn't even cause problems on my prints lol, more just a theoretical thing I think every time I watch my extruder swing around on elastic doing infill and think "that can't be good". It's better than a software option to keep it within a set distance, with my firmware I could set both motors to do the exact same thing, one would just be mounted 3 inches above the other, as long as the arms were the same length and distance, they would move together exactly. I'm not entirely sure I agree that weight on the carriages isn't better than weight on the effector. I'm too lazy to explain why I think that is, but momentum on the end of a stick is harder to control than momentum at the start of a stick, no? I'm honestly not even sure, I'm not a physicist, it just seems to me I'd rather distribute the weight on the carriages then the effector intuitively.
Edited 1 time(s). Last edit at 09/06/2017 12:28AM by clearlynotstefan.
Edited 1 time(s). Last edit at 09/06/2017 12:28AM by clearlynotstefan.
|
Re: Double Arm flying extruder. September 06, 2017 03:40AM |
Registered: 8 years ago Posts: 5,232 |
The carriers move at different speeds/accelerations, while the effector "should" move at constant speed/acceleration.
Add weight to the carriers and you will see all sorts of resonance effects.
The belts will be stretched more and their ringing gets visible, whenever the carrier speed/acceleration is worse.
Add weight to the carriers and you will see all sorts of resonance effects.
The belts will be stretched more and their ringing gets visible, whenever the carrier speed/acceleration is worse.
|
Re: Double Arm flying extruder. September 06, 2017 03:42AM |
Registered: 9 years ago Posts: 31 |
I'm replying to this thread instead of the former thread in the Duet subforum because I think it's more appropriate here.
My idea is aligning with frankvdh's. Except that the fishing lines are much simpler than the second set of carriages/diagonal rods.
I think we all agree that the long Bowden is the problem.
The flying extruder use elastic between the extruder and carriages. The elastic force balance when the extruder is near the center (+- force from the Bowden tube/effector). So when the effector is near the edge, there is some force that pulls the Bowden back to the center.
clearlynotstefan's method drives the extruder by a new set of motors & carriages & diagonal rod. The effector & the extruder move 1:1 in X-Y plane.
What I wrote in the former thread was about the lazy follower.
I think it's estentially the same as what frankvdh is describing.
Quote
frankvdh
Your "double delta" idea would allow the same kind of thing in software, doing on-the-fly digital filtering of the motion commands so that the extruder stays within some specified distance of the hot-end position. Or software could pre-calculate the motion of the extruder to keep it within bounds of speed and acceleration and distance from the hot-end. Effectively, this would "tune" your suspension to each object being printed.
My idea is aligning with frankvdh's. Except that the fishing lines are much simpler than the second set of carriages/diagonal rods.
I think we all agree that the long Bowden is the problem.

The flying extruder use elastic between the extruder and carriages. The elastic force balance when the extruder is near the center (+- force from the Bowden tube/effector). So when the effector is near the edge, there is some force that pulls the Bowden back to the center.

clearlynotstefan's method drives the extruder by a new set of motors & carriages & diagonal rod. The effector & the extruder move 1:1 in X-Y plane.

What I wrote in the former thread was about the lazy follower.



I think it's estentially the same as what frankvdh is describing.
|
Re: Double Arm flying extruder. September 06, 2017 03:56AM |
Registered: 9 years ago Posts: 31 |
The idea is to move the extruder as slow and less frequent as possible while keeping the Bowden tube sort. With proper look ahead and calculation, the extruder can move the same time, before or after the effector to minimize the acceleration of the extruder.
PS: My plan is for the Diamond Hotend. The 3 x extruders are heavy!
PS: My plan is for the Diamond Hotend. The 3 x extruders are heavy!
|
Re: Double Arm flying extruder. September 06, 2017 05:06AM |
Registered: 7 years ago Posts: 154 |
THe thing is, with a flying extruder, you're already adding that weight to the carrier anyway. and worse, you're suspending it from elastic which is going to bounce it around and exacerbate the effect it has, How much weight can you be adding by adding arms so it gets pushed where it needs to be instead of dangling in the air?
|
Re: Double Arm flying extruder. September 06, 2017 05:35AM |
Registered: 9 years ago Posts: 31 |
Quote
clearlynotstefan
THe thing is, with a flying extruder, you're already adding that weight to the carrier anyway. and worse, you're suspending it from elastic which is going to bounce it around and exacerbate the effect it has, How much weight can you be adding by adding arms so it gets pushed where it needs to be instead of dangling in the air?
It's not about the weight added. It's about momentum, the moving mass. In flying extruder, the extruder didn't move much because the force between those elastic pull it to the center. It's rotating though because the effector pulls it by the Bowden tube.The motors didn't really push or pull the extruder around.
If you extend your carriage and add another set of diagonal rods, now the extruder is one of the moving mass. The motors need more torque to push or pull the extruder around.
|
Re: Double Arm flying extruder. September 06, 2017 05:55AM |
Registered: 10 years ago Posts: 732 |
One adds flying extruder to shorten the bowden tube (which makes filament extrusion amount more precise).
It makes hotend position error smaller when compared to extruder mounted directly on the platform. The reason is that the connection between platform and (heavy) extruder is not rigid. Therefore the extruder is under smaller accelerations and causes smaller hotend error. The point is that hotend position error depends only on accelerations and not on speed.
Anyway this is mostly moot for most people with deltas since they run them with too small accelerations. Notice that most people are perfectly fine with glass core belts. They last longer when used with smaller pulleys but they are terribly stretchy compared to steel core belts. Also Ø 8 mm rods are too thin for people with classical Rostock who want to run it quickly.
Edited 1 time(s). Last edit at 09/06/2017 05:57AM by hercek.
It makes hotend position error smaller when compared to extruder mounted directly on the platform. The reason is that the connection between platform and (heavy) extruder is not rigid. Therefore the extruder is under smaller accelerations and causes smaller hotend error. The point is that hotend position error depends only on accelerations and not on speed.
Anyway this is mostly moot for most people with deltas since they run them with too small accelerations. Notice that most people are perfectly fine with glass core belts. They last longer when used with smaller pulleys but they are terribly stretchy compared to steel core belts. Also Ø 8 mm rods are too thin for people with classical Rostock who want to run it quickly.
Edited 1 time(s). Last edit at 09/06/2017 05:57AM by hercek.
|
Re: Double Arm flying extruder. September 06, 2017 11:31AM |
Registered: 8 years ago Posts: 5,232 |
|
Re: Double Arm flying extruder. September 06, 2017 04:07PM |
Registered: 8 years ago Posts: 3,525 |
I think it would be interesting to see both ideas tried out for real and the lazy follower idea too. However it's hard not to conclude the answer is the flexible driveshaft extruder, adds just 28-45g on the effector, and moves the motor to a stationary position. Sure the drive cable has a bit of stiffness but with the right mounting this adds way less mass and momentum to the effector than a direct extruder and lot less also than a flying extruder.
I've gone from long bowden, to optimised bowden with mid height extruder, to flying extruder (and dual flying extruder, this really did produce noticeable artefacts), to remote direct drive and I know that I'm not going back to any of the previous schemes.
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
I've gone from long bowden, to optimised bowden with mid height extruder, to flying extruder (and dual flying extruder, this really did produce noticeable artefacts), to remote direct drive and I know that I'm not going back to any of the previous schemes.
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
|
Re: Double Arm flying extruder. September 06, 2017 04:31PM |
Registered: 9 years ago Posts: 978 |
Quote
clearlynotstefan
THe thing is, with a flying extruder, you're already adding that weight to the carrier anyway. and worse, you're suspending it from elastic which is going to bounce it around and exacerbate the effect it has, How much weight can you be adding by adding arms so it gets pushed where it needs to be instead of dangling in the air?
The trick is to make the elastic less elastic; some kind of damper to absorb low-amplitude movements, but not high-amplitude ones. If you had some damping on your balloons, limiting the rate of energy transfer to/from them, the extruder wouldn't bounce around (as much).
[Edit] A couple more thoughts:
A damped-elastic connection between extruder and effector. e.g. a delta with 3 (6?) short rods attaching the extruder to the hot-end. Springs and dampers (or steppers?) control the motion of the extruder relative to the hot-end, so that the extruder doesn't move much but still stays within Bowden-tube range of the hot-end.
An easy damper would be a simple brake; it would absorb the high-frequency motion and waste it as heat. Some energy might need to be transferred to the extruder (e.g. pulled around by the Bowden tube somewhat) to keep it in the right position. Probably the ideal mechanism would store the high-frequency low-amplitude energy and release it slowly as low-frequency motion.
Just for completeness. There is also such a thing a rotational momentum; so long as the rotational axes of a flying extruder are close to the centre of mass of the extruder, this should be small. Probably small enough to be ignored.
Also, in case anyone takes my posts on this topic as some kind of professional advice... I am not a mechanical engineer.
Edited 1 time(s). Last edit at 09/06/2017 05:23PM by frankvdh.
|
Re: Double Arm flying extruder. September 06, 2017 04:53PM |
Registered: 8 years ago Posts: 3,525 |
Nebbian made shock absorbers from aluminium tubes and springs, seemed to work well.
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
|
Re: Double Arm flying extruder. September 07, 2017 06:40PM |
Registered: 11 years ago Posts: 1,807 |
or maybe a direct extruder to the effektor :-)
[www.youtube.com]
[www.youtube.com]
here photos from the Printresult (first Benchy for calibration):
[forums.reprap.org]
Effector with Nema14 Steppermotor, Hotend, Fan, Light ... 350 Gramm
Edited 1 time(s). Last edit at 09/07/2017 06:44PM by angelo.
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
[www.youtube.com]
[www.youtube.com]
here photos from the Printresult (first Benchy for calibration):
[forums.reprap.org]
Effector with Nema14 Steppermotor, Hotend, Fan, Light ... 350 Gramm
Edited 1 time(s). Last edit at 09/07/2017 06:44PM by angelo.
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
|
Re: Double Arm flying extruder. September 07, 2017 06:52PM |
Registered: 8 years ago Posts: 3,525 |
Pcb smart effector with nimble 170g.
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
|
Re: Double Arm flying extruder. September 07, 2017 07:11PM |
Registered: 11 years ago Posts: 1,807 |
very cool solution the Nimble, but drive cables has torsion tolerance (not direct) and the Cable was heavy weight.
My hole Effector without Neopixel Light about 25 Euro + 100 Gramm PET-G and easy to Install (for me).
The direct drive Nema14 1,8 deg Extruder run day and night or weeks or months with
1/64 Microsteps (without vibrations) with retract from 0,5mm 80mm/s.
I Need this for precision Print-result.
But also a very cool solution.
[zesty.tech]
There are many ways for this and i like to see the solutions.
Thank you for sharing and sorry for my bad explanation in English :-)
angelo
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
My hole Effector without Neopixel Light about 25 Euro + 100 Gramm PET-G and easy to Install (for me).
The direct drive Nema14 1,8 deg Extruder run day and night or weeks or months with
1/64 Microsteps (without vibrations) with retract from 0,5mm 80mm/s.
I Need this for precision Print-result.
But also a very cool solution.
[zesty.tech]
There are many ways for this and i like to see the solutions.
Thank you for sharing and sorry for my bad explanation in English :-)
angelo
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
|
Re: Double Arm flying extruder. September 07, 2017 07:16PM |
Registered: 8 years ago Posts: 3,525 |
Makes sense to me. Mein Deutsch ist sehr schlecht.
If a motor plus gearbox could be found under 100g that could drive an extruder then we'd have a solution with no downsides. I know a project tried a very small dc motor with gearbox but it wasn't strong enough.
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
If a motor plus gearbox could be found under 100g that could drive an extruder then we'd have a solution with no downsides. I know a project tried a very small dc motor with gearbox but it wasn't strong enough.
Simon Khoury
Co-founder of [www.precisionpiezo.co.uk] Accurate, repeatable, versatile Z-Probes
Published:Inventions
|
Re: Double Arm flying extruder. September 07, 2017 07:26PM |
Registered: 11 years ago Posts: 1,807 |
When I finish my leadscrew Delta Printer, I like to publish / share it with you (open source).
Maybe someone like to build it also :-)
The Parts for the first setup to buy ca. 600 Euro
with Macrolon housing Magnetic Endstop and magnetic Key (safty) etc .. 700 euro
with Printserver 3,5" touch Odroid C2 cam etc.. maximum 900 Euro.
A good Printer for all, that is my Vision :-)
Good night
Angelo
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
Maybe someone like to build it also :-)
The Parts for the first setup to buy ca. 600 Euro
with Macrolon housing Magnetic Endstop and magnetic Key (safty) etc .. 700 euro
with Printserver 3,5" touch Odroid C2 cam etc.. maximum 900 Euro.
A good Printer for all, that is my Vision :-)
Good night
Angelo
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
|
Re: Double Arm flying extruder. September 08, 2017 02:45AM |
Registered: 8 years ago Posts: 5,232 |
The cycloidal gearbox extruder from powdermetall was close to 100gr incl. hotend. It just didn't fit on my standard Traxxas effector, but I'm tempted to try again on dc42s smart effector. ( wider rod distance and bigger rods too )
Sorry for OT
Edited 1 time(s). Last edit at 09/08/2017 02:50AM by o_lampe.
Sorry for OT
Edited 1 time(s). Last edit at 09/08/2017 02:50AM by o_lampe.
|
Re: Double Arm flying extruder. September 08, 2017 09:22AM |
Registered: 11 years ago Posts: 1,807 |
the cycloidial gearbox i have printout and testet.
Nice Idea, but the Wobble make a lot of vibration and the round nema 14 was to hot (shit :-( ).
For long therm prints personaly i do not trust this extruder.
I have try this steppermotor and the bigger.
That was the perfect solution, but for me not work.
this (5Ncm 50 gramm):
[www.omc-stepperonline.com]
and this (8,5 Ncm and 100 gramm):
[www.omc-stepperonline.com]
My Effector also support also the round Nema14 100 gramm.
I have test it at first ... :-)
With an 180 gramm Nema14 it works fine for me:
Now I have ordered this Steppermotor (Weight : 140g) it not for fast turn, but i need a high Torque, so it can work ... (Nema 14 Bipolar 1.8deg 14Ncm (20oz.in) 0.4A 12V ).
[www.omc-stepperonline.com]
I press the thumb for me :-)
Angelo
Edited 1 time(s). Last edit at 09/08/2017 09:26AM by angelo.
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
Nice Idea, but the Wobble make a lot of vibration and the round nema 14 was to hot (shit :-( ).
For long therm prints personaly i do not trust this extruder.
I have try this steppermotor and the bigger.
That was the perfect solution, but for me not work.
this (5Ncm 50 gramm):
[www.omc-stepperonline.com]
and this (8,5 Ncm and 100 gramm):
[www.omc-stepperonline.com]
My Effector also support also the round Nema14 100 gramm.
I have test it at first ... :-)

With an 180 gramm Nema14 it works fine for me:

Now I have ordered this Steppermotor (Weight : 140g) it not for fast turn, but i need a high Torque, so it can work ... (Nema 14 Bipolar 1.8deg 14Ncm (20oz.in) 0.4A 12V ).
[www.omc-stepperonline.com]
I press the thumb for me :-)
Angelo
Edited 1 time(s). Last edit at 09/08/2017 09:26AM by angelo.
Mein Club: [hackerspace-ffm.de]
RADDS-Shield -> Commercial [max3dshop.org]
|
Re: Double Arm flying extruder. September 15, 2017 12:10AM |
Registered: 6 years ago Posts: 1,007 |
Came across this thread looking for lightweight extruder.
My current extruder/hot end etc mass is 220g (270g with carriage for a Geetech Prusa) made with gears and motor from an old HP Laserjet.
I got this Nema 14 motor 14Ncm and without gears, its torque is just barely enough. I am looking for a 1/3 gear ratio that will allow the use of the lighter pancake Nema 14.
The gear reduction of the cycloidal gear mentioned or even regular planetary box are too high and the stepper will not be able to retract fast. I tried worm gears too, same issues.
They look nice, are smart and fun but offer no advantage compared to regular gears here (in fact plenty of drawbacks).
Miniature timing belt (1mm pitch) would be nice but not readily available for hobbyist.
Edited 1 time(s). Last edit at 09/15/2017 12:24AM by MKSA.
"A comical prototype doesn't mean a dumb idea is possible" (Thunderf00t)
My current extruder/hot end etc mass is 220g (270g with carriage for a Geetech Prusa) made with gears and motor from an old HP Laserjet.
I got this Nema 14 motor 14Ncm and without gears, its torque is just barely enough. I am looking for a 1/3 gear ratio that will allow the use of the lighter pancake Nema 14.
The gear reduction of the cycloidal gear mentioned or even regular planetary box are too high and the stepper will not be able to retract fast. I tried worm gears too, same issues.
They look nice, are smart and fun but offer no advantage compared to regular gears here (in fact plenty of drawbacks).
Miniature timing belt (1mm pitch) would be nice but not readily available for hobbyist.
Edited 1 time(s). Last edit at 09/15/2017 12:24AM by MKSA.
"A comical prototype doesn't mean a dumb idea is possible" (Thunderf00t)
|
Re: Double Arm flying extruder. September 15, 2017 02:43AM |
Registered: 10 years ago Posts: 14,672 |
With the extruder drive mounted directly on the effector, you need very little retraction and it doesn't need to be fast. So in this situation you can use a gear ratio much higher than 3:1. The remote direct drive extruders on the market use 30:1 and 40:1.
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
Large delta printer [miscsolutions.wordpress.com], E3D tool changer, Robotdigg SCARA printer, Crane Quad and Ormerod
Disclosure: I design Duet electronics and work on RepRapFirmware, [duet3d.com].
|
Re: Double Arm flying extruder. September 15, 2017 03:37AM |
Registered: 6 years ago Posts: 1,007 |
Quote
dc42
With the extruder drive mounted directly on the effector, you need very little retraction and it doesn't need to be fast. So in this situation you can use a gear ratio much higher than 3:1. The remote direct drive extruders on the market use 30:1 and 40:1.
Currently I use it on a Prusa and my aim is to get the extruder/hot end... as light as possible. The mass of such a gearbox made with the right materials will null the gain made on the motor. As for worm gears, the friction is too much. I tried with worm gears and a small NEMA.
The only substantial gain would be to use servo motors, not steppers.
The Flexdrive is a different approach.
"A comical prototype doesn't mean a dumb idea is possible" (Thunderf00t)
|
Re: Double Arm flying extruder. October 16, 2017 05:42PM |
Registered: 6 years ago Posts: 10 |
|
Re: Double Arm flying extruder. October 18, 2017 05:48PM |
Registered: 6 years ago Posts: 2 |
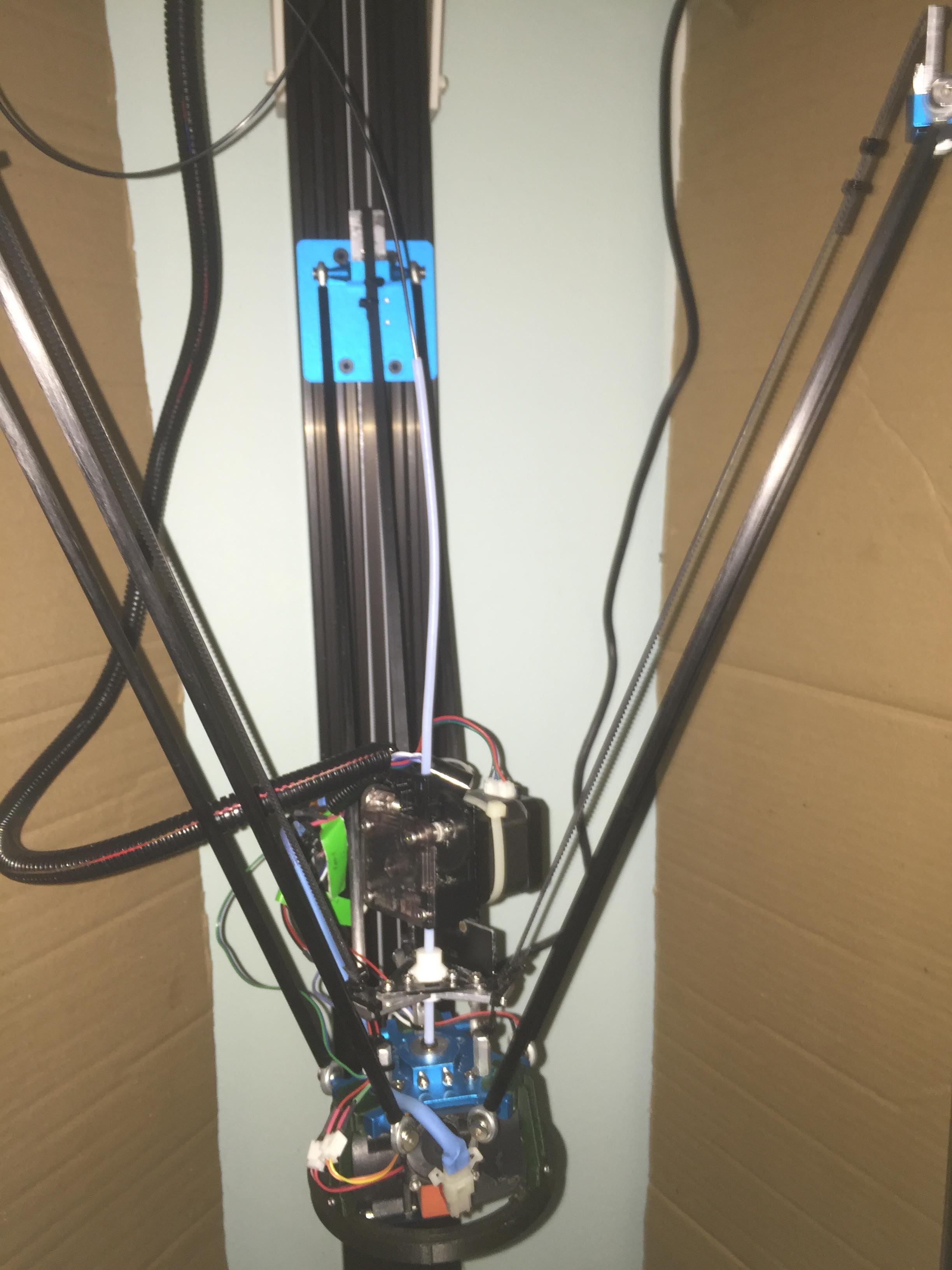
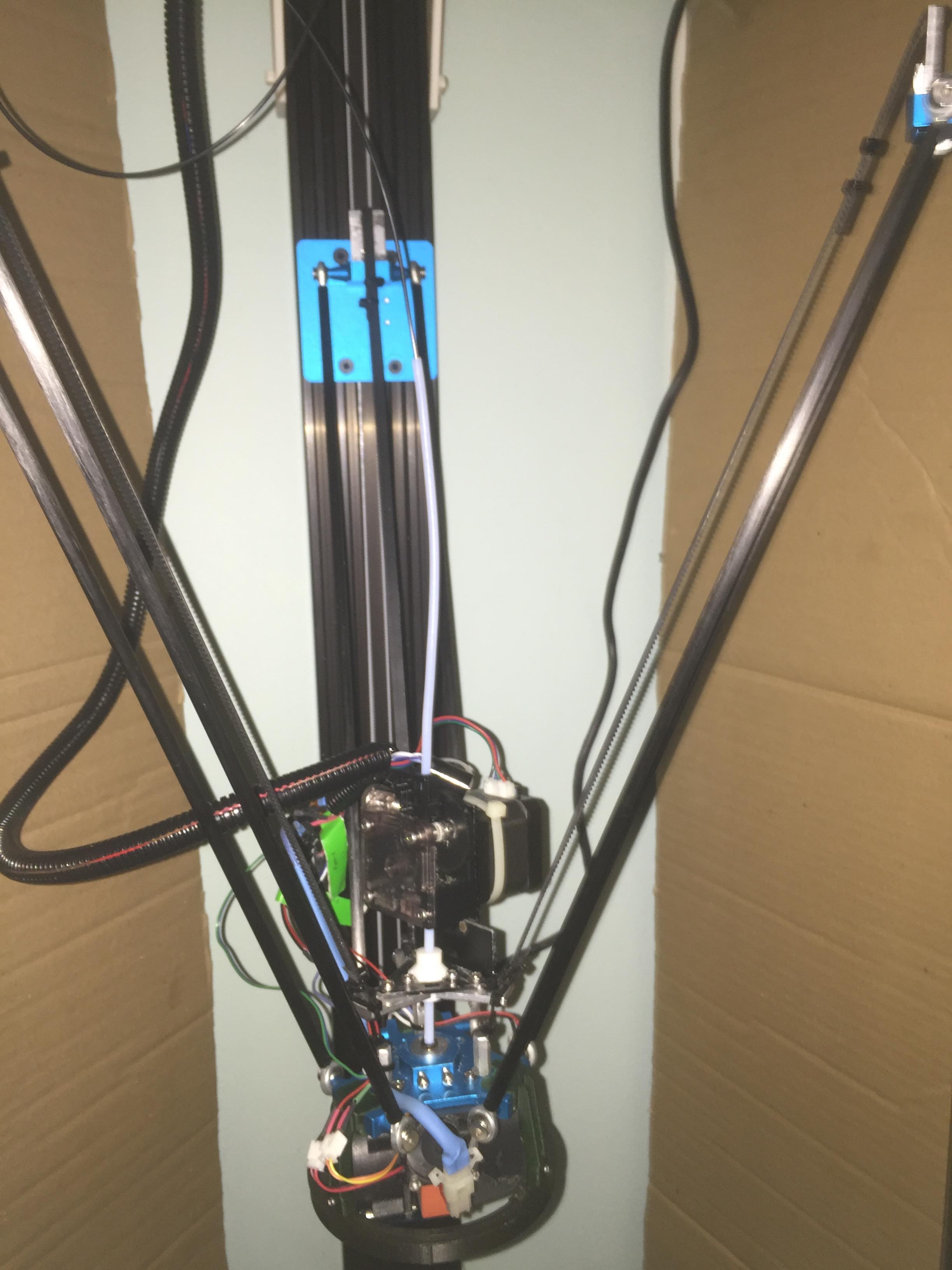
I wound up making something that acts like a double carriage/motor without the extra complexity of adding them. Sort of a "Floating Extruder" configuration.
I had a filament jam rip out the spring clamps in the pneumatic fittings several times on my TEVO Little Monster. I was getting desperate because it was chewing through connectors like candy.
I decided to find a way of mount the extruder so that the force of pushing the filament was not taken up by the connectors or the PTFE tube. I also noticed that the extruder deflection from the center of the effector was so severe in some positions that I could not feed filament into it without moving the effector.
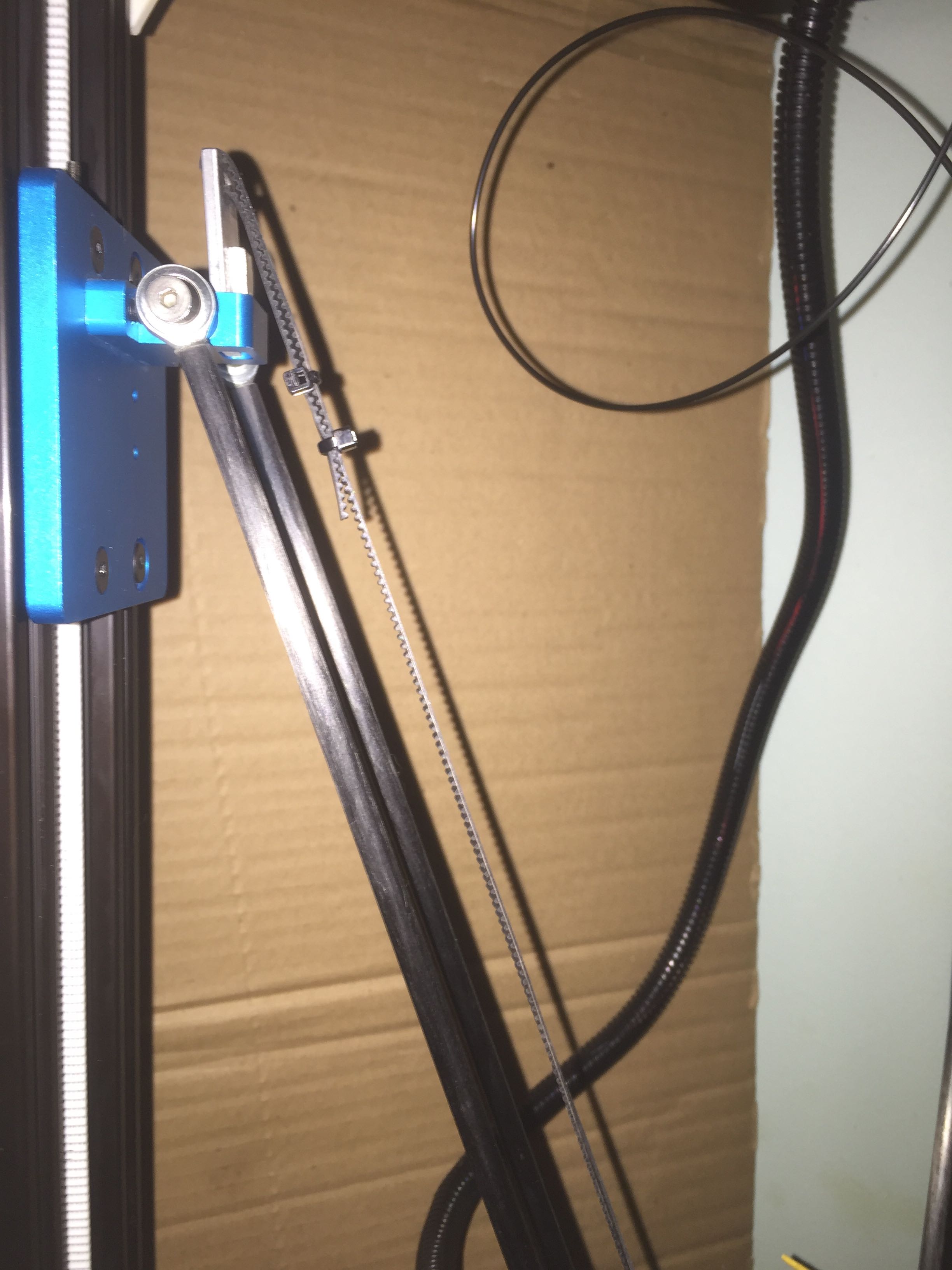
In the end I made the length of GTA belts attaching the extruder to the carriages the same length and parallel (as close as I could get) to the delta arms and centered the extruder bore with the effector center. I used 3 tie wraps as cables to pull the mounting bracket to the effector to keep the mounting plate parallel to the effector.
What resulted is quite a well working setup.
The off-center motor creates a torque on the effector plate which is taken up by the arms with no ill effects that I could notice so far. The mounting plate shifts around on the cable ties as the effector moves, creating a shock absorber for the mass of the extruder motor during fast moves. I can see on rapid short infills the extruder and motor amplitude is much smaller than the effector.
The deflection of the PTFE tube from the extruder to the hot-end is a maximum of 5 mm off-center and since it is centered when the effector is centered this is the worst case condition. Previously maximum deflection was about 1.25 inches (30 mm) on one side and reduced on the other.
There are a few gotchas:
1. the extruder needs to be rotated so that the motor sticks out between two sets of arms, otherwise it is closer to one set and makes contact with the arm when effector moves towards that column.
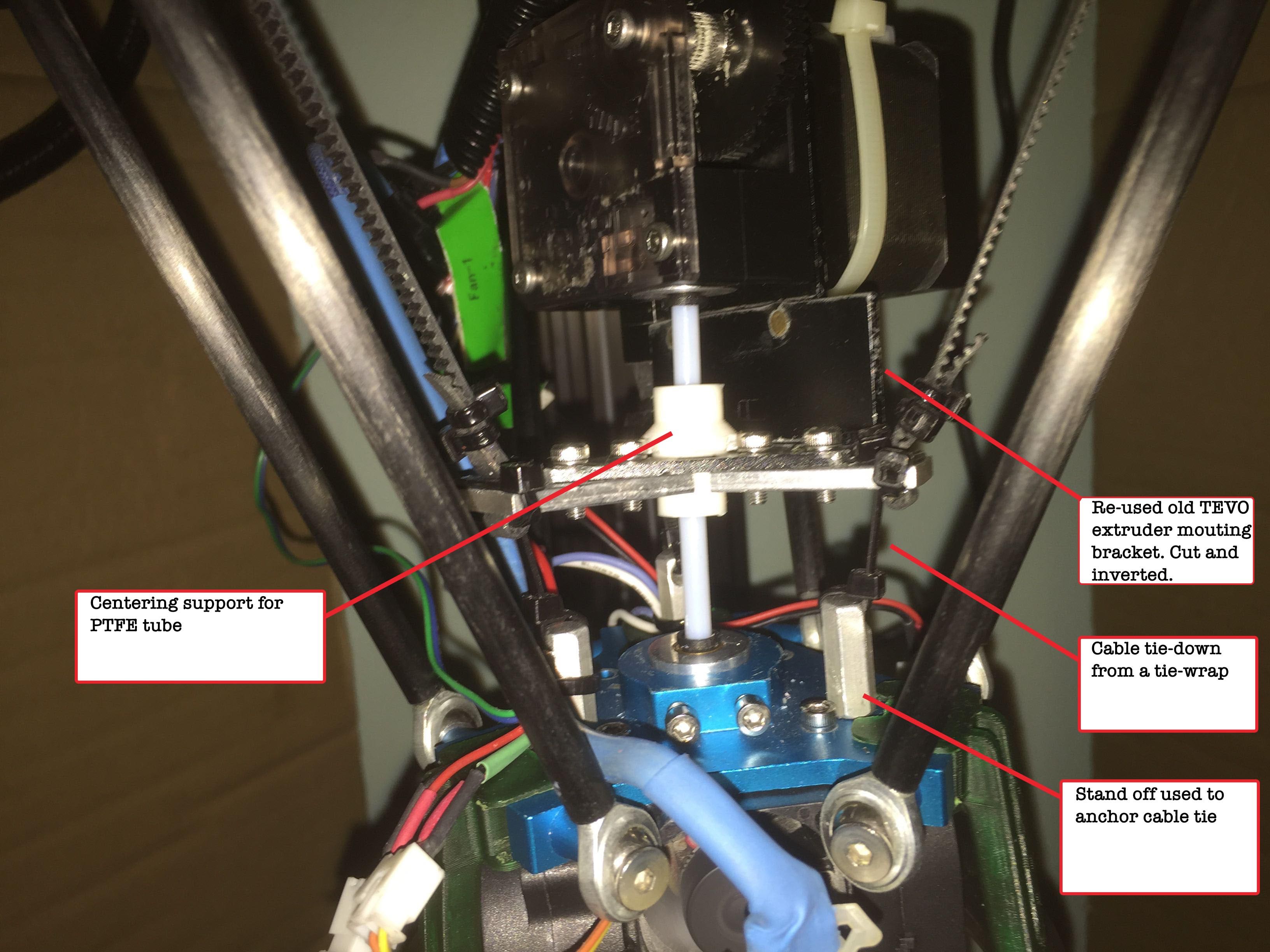
2. Since the PTFE tube no longer provides the holding force to pushing of the filament it needs to have some support in the center to prevent it from bending out sideways when the filament gets jammed. I did this by providing support in the center of the extruder mounting plate.
It looks like a dog's breakfast right now because I did the change out of desperation while trying to get the printer working after a filament jam so had to make it out of what was at hand and what I could work with since I could not print anything. I used the old mounting bracket and some aluminum strips to make a working unit.
I am completely redesigning the mount to make it cleaner and easier to remove. I'll do that right after finishing the replacement fan shroud to provide better part cooling with bigger and quieter fans with air flow directed around the nozzle. Original TEVO has the fans blowing about 8 mm off nozzle. Extrusions that fit within the 16mm diameter or ones that extrude forward/backwards, got no part cooling at all.
I finally got the printer working (after a month including upgrading the controller to Duet Wifi) so have a lot of parts to design and print.
Edited 2 time(s). Last edit at 10/18/2017 06:28PM by vsch.
I had a filament jam rip out the spring clamps in the pneumatic fittings several times on my TEVO Little Monster. I was getting desperate because it was chewing through connectors like candy.
I decided to find a way of mount the extruder so that the force of pushing the filament was not taken up by the connectors or the PTFE tube. I also noticed that the extruder deflection from the center of the effector was so severe in some positions that I could not feed filament into it without moving the effector.
In the end I made the length of GTA belts attaching the extruder to the carriages the same length and parallel (as close as I could get) to the delta arms and centered the extruder bore with the effector center. I used 3 tie wraps as cables to pull the mounting bracket to the effector to keep the mounting plate parallel to the effector.
What resulted is quite a well working setup.
The off-center motor creates a torque on the effector plate which is taken up by the arms with no ill effects that I could notice so far. The mounting plate shifts around on the cable ties as the effector moves, creating a shock absorber for the mass of the extruder motor during fast moves. I can see on rapid short infills the extruder and motor amplitude is much smaller than the effector.
The deflection of the PTFE tube from the extruder to the hot-end is a maximum of 5 mm off-center and since it is centered when the effector is centered this is the worst case condition. Previously maximum deflection was about 1.25 inches (30 mm) on one side and reduced on the other.
There are a few gotchas:
1. the extruder needs to be rotated so that the motor sticks out between two sets of arms, otherwise it is closer to one set and makes contact with the arm when effector moves towards that column.
2. Since the PTFE tube no longer provides the holding force to pushing of the filament it needs to have some support in the center to prevent it from bending out sideways when the filament gets jammed. I did this by providing support in the center of the extruder mounting plate.
It looks like a dog's breakfast right now because I did the change out of desperation while trying to get the printer working after a filament jam so had to make it out of what was at hand and what I could work with since I could not print anything. I used the old mounting bracket and some aluminum strips to make a working unit.
I am completely redesigning the mount to make it cleaner and easier to remove. I'll do that right after finishing the replacement fan shroud to provide better part cooling with bigger and quieter fans with air flow directed around the nozzle. Original TEVO has the fans blowing about 8 mm off nozzle. Extrusions that fit within the 16mm diameter or ones that extrude forward/backwards, got no part cooling at all.
I finally got the printer working (after a month including upgrading the controller to Duet Wifi) so have a lot of parts to design and print.
Edited 2 time(s). Last edit at 10/18/2017 06:28PM by vsch.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.