Tripteron Implementation
Posted by Apsu
|
Re: Tripteron Implementation December 02, 2016 12:11AM |
Registered: 7 years ago Posts: 143 |
|
Re: Tripteron Implementation December 03, 2016 02:17PM |
Registered: 7 years ago Posts: 143 |
First tower essentially complete!
Getting there, slowly but surely




Getting there, slowly but surely
|
Re: Tripteron Implementation December 03, 2016 07:31PM |
Registered: 7 years ago Posts: 143 |
Endstop mounted up and configured and working great!
YouTube Link
Waiting on final bracket set to finish printing then I'll finish frame tonight.
YouTube Link
Waiting on final bracket set to finish printing then I'll finish frame tonight.
|
Re: Tripteron Implementation December 04, 2016 02:47AM |
Registered: 7 years ago Posts: 143 |

Got the beast together. At least enough bolts to stay put, while I go sleep off the hours of hunching over disassembling the old frame and assembling the new one ;P Arms and movement tomorrow!
|
Re: Tripteron Implementation December 05, 2016 04:23PM |
Registered: 7 years ago Posts: 143 |
Alright, got a little delayed and had a few setbacks, but my proof of concept prototype took her first steps!
YouTube Link
Several things aren't working great yet, but I am confident they can be tweaked and refined successfully. The first major thing I noticed is the bearings tend to bind a bit when tightened sufficiently to avoid tilting a lot, and it seems to be because their shields are way too flush (hard to spin them in your fingers even because of how high the shields are) so the washer in the joints is binding up. I'm going to try removing that shield (and maybe inside-facing shields) to see if that solves it.
When an actuator changes direction, and the bearings bind, instead of pushing the arm out (or in) like it should, instead it just lifts/lowers the arm as a rigid unit, which causes the effector to tilt a little, pausing its XY motion, until the friction is overcome and then it sort of jumps into being level again, and continues until the next direction change for that actuator. I may also need to try a steeper arm angle than the current 25 degrees to increase the ratio of XY:Z force an actuator exerts on an arm. We'll see.
But all that aside, woot! Incredibly excited that the machine, code and motion is all working! More to come soon I'm sure.
YouTube Link
Several things aren't working great yet, but I am confident they can be tweaked and refined successfully. The first major thing I noticed is the bearings tend to bind a bit when tightened sufficiently to avoid tilting a lot, and it seems to be because their shields are way too flush (hard to spin them in your fingers even because of how high the shields are) so the washer in the joints is binding up. I'm going to try removing that shield (and maybe inside-facing shields) to see if that solves it.
When an actuator changes direction, and the bearings bind, instead of pushing the arm out (or in) like it should, instead it just lifts/lowers the arm as a rigid unit, which causes the effector to tilt a little, pausing its XY motion, until the friction is overcome and then it sort of jumps into being level again, and continues until the next direction change for that actuator. I may also need to try a steeper arm angle than the current 25 degrees to increase the ratio of XY:Z force an actuator exerts on an arm. We'll see.
But all that aside, woot! Incredibly excited that the machine, code and motion is all working! More to come soon I'm sure.
|
Re: Tripteron Implementation December 06, 2016 01:05PM |
Registered: 11 years ago Posts: 979 |
Awesome work!
Side thought: All of those joints have pretty low angular velocity. A pin joint could perform very well here.
Edited 1 time(s). Last edit at 12/06/2016 01:08PM by nicholas.seward.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
Side thought: All of those joints have pretty low angular velocity. A pin joint could perform very well here.
Edited 1 time(s). Last edit at 12/06/2016 01:08PM by nicholas.seward.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
|
Re: Tripteron Implementation December 06, 2016 01:37PM |
Registered: 7 years ago Posts: 143 |
Quote
nicholas.seward
Awesome work!
Side thought: All of those joints have pretty low angular velocity. A pin joint could perform very well here.
Thanks! And yeah, I wasn't sure what a good way to design fastening would be, yet. I feel like bushings and smooth axles (shoulder bolts or e-clip rod or similar) would work fine, but I'm not entirely sure. Right now, I printed a smaller/thicker effector with higher infill that doesn't flex at all, and with the bearing shields off I can preload much higher without binding, so that's all improved.
The big problem is the printed nut sockets. At M5 sizes, it seems that the bolt/nut/plastic interface isn't nearly strong enough to prevent some bolt wobble unless I clamp it down so tight it binds up the radial bearings. I think I need to look into bushing inserts -- either press-fit, heat-set, or something along those lines. I figured I might try making the joint "back" surfaces coplanar with the front, taking out the nut-slot cutouts, and trying to fit a large washer in its place, to spread and stabilize the forces.
I'd love to hear more of your thoughts on specifics of using pins (and I assume bushings) instead of bearings.
EDIT: I guess a shoulder bolt on bushings with a low-friction washer (PTFE or similar) inbetween might actually work great, with minimal clamping force. More convenient than acquiring or machining a slotted pin for an axle.
Edited 1 time(s). Last edit at 12/06/2016 01:39PM by Apsu.
|
Re: Tripteron Implementation December 06, 2016 02:03PM |
Registered: 7 years ago Posts: 143 |
Something like this might be ideal, actually. They're pretty cheap, $1.82 each (for 5mm ID). I could even fit 2 per link end, with the flanges out, and only end up with 1.5mm more link-link separation than I have now, and just let the oil-impregnated surfaces slide against each other under moderate preload, with some washers big enough to ride the flanges under bolt/nut. That makes the sliding surfaces washer-flange, flange-flange, flange-washer, and bolt-sleeve in varying degrees as the two washer+flanges slip differing amounts. Essentially the bolt/nut unit floats a little.
That'd give 18mm of supported width on each 15x15 link (counting flanges) with a total of 39mm across the joint, and gives an *easy* to print straight through hole for press-fitting into. If I redesign the shoulders and wrists to accommodate bushings it might be very easy and cheap to make robust without fighting radial bearings as much.
That'd give 18mm of supported width on each 15x15 link (counting flanges) with a total of 39mm across the joint, and gives an *easy* to print straight through hole for press-fitting into. If I redesign the shoulders and wrists to accommodate bushings it might be very easy and cheap to make robust without fighting radial bearings as much.
|
Re: Tripteron Implementation December 06, 2016 02:45PM |
Registered: 11 years ago Posts: 225 |
Hi,
First, fantastic work! But why ? :p
No seriously, design new concept is really interesting but with this concept what is the advantage again delta/corexy/simple cartesian ?
Seem like there is many effort/torque on that joints that can be problematic with precision. no?
I really curious about repeatability and precision.
To me (and just to me), the only pro for a machine like this, is that it's just beauty to see kinematic moving in a non cartesian movement
Of course it's not critics! just curious about pro/con
First, fantastic work! But why ? :p
No seriously, design new concept is really interesting but with this concept what is the advantage again delta/corexy/simple cartesian ?
Seem like there is many effort/torque on that joints that can be problematic with precision. no?
I really curious about repeatability and precision.
To me (and just to me), the only pro for a machine like this, is that it's just beauty to see kinematic moving in a non cartesian movement
Of course it's not critics! just curious about pro/con
|
Re: Tripteron Implementation December 06, 2016 04:02PM |
Registered: 7 years ago Posts: 143 |
Quote
zelogik
Hi,
First, fantastic work! But why ? :p
No seriously, design new concept is really interesting but with this concept what is the advantage again delta/corexy/simple cartesian ?
Seem like there is many effort/torque on that joints that can be problematic with precision. no?
I really curious about repeatability and precision.
To me (and just to me), the only pro for a machine like this, is that it's just beauty to see kinematic moving in a non cartesian movement
Of course it's not critics! just curious about pro/con
Thanks! I gave a long list of pros/cons earlier in this thread, but the primary benefit of the Tripterons is that they are linear, so they have constant accuracy throughout their build volume. Generally speaking, the configuration of a linear delta is more compact than a Cartesian, and can be scaled to larger volumes a little more easily. Plus it has a fixed bed, which is a bit more difficult to achieve in Cartesian gantry systems. So the goal of this colinear Tripteron is to mix the best features of a Delta and try to improve some of the downsides and complexities.
As for the joint system, the simulations indicate that as long as the joints themselves are solid, the force distribution results in Very reasonable behavior at the effector, so that's what I'm working on proving and demonstrating. We'll see how far I can get
|
Re: Tripteron Implementation December 09, 2016 03:16PM |
Registered: 7 years ago Posts: 143 |
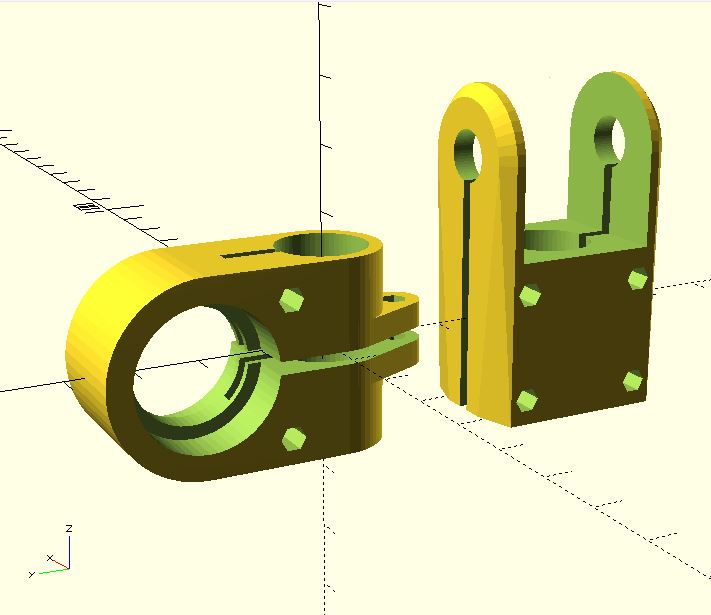
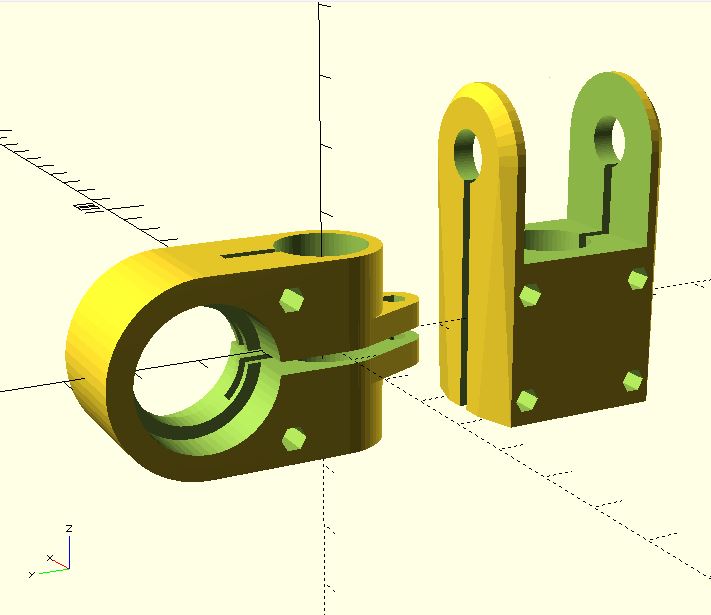
Small update, I've decided to try out a similar joint arrangement to what I did on the orthogonal Tripteron, except using 15x15mm OpenBeam which is light, cheap and strong. Amazon had a great deal with 180mm length pieces which is basically perfect, and they're arriving today. I've also got some 5x30mm shoulder bolts coming, but I'm going to try testing with plain M5 bolts in the meantime. I modeled up a test joint just to get something put together and get it in my hands. One set of brackets is printing now. This should also slightly improve Z height by not having the overlapping arm links, plus the joint design is double-shear instead of single-shear, and the doubled support should vastly increase stiffness.
Here's a little render of the mockup so the general idea is hopefully clearer.
Been busy lately but wanted to provide a bit of an update. More to come soon!
Here's a little render of the mockup so the general idea is hopefully clearer.

Been busy lately but wanted to provide a bit of an update. More to come soon!
|
Re: Tripteron Implementation December 10, 2016 10:20AM |
Registered: 8 years ago Posts: 5,232 |
I also try to print a joint for my 14mm carbon rods, but failed in every aspect to get a doable and stable part. The latest attempt was to use HIPS as support material for a PLA part. But this material combo is not working really well with a diamond hotend ( single nozzle = same temperature for both )
Also the absence of a purge-tower in slic3r didn't help.
Also the absence of a purge-tower in slic3r didn't help.
|
Re: Tripteron Implementation December 10, 2016 01:17PM |
Registered: 10 years ago Posts: 12 |
Hello!
I'm also trying to buid tripteron.
At first i wanted it to be without any linear slides, only trapezoidal screws, but failed to mount arm on nuts, that it won't move, so i had a "leaning" sideways arm, as nuts "tickle" on screw. Of course used two nuts, different rubbers, screws, elongations, etc. Nothing helped..
[www.youtube.com]
So i ordered linear slides and this is what i've done today. No plastic, only 2040 extrusion (left from other projects), some 20*20 aluminum tube, screws and so on.
[www.youtube.com]
I'm also trying to buid tripteron.
At first i wanted it to be without any linear slides, only trapezoidal screws, but failed to mount arm on nuts, that it won't move, so i had a "leaning" sideways arm, as nuts "tickle" on screw. Of course used two nuts, different rubbers, screws, elongations, etc. Nothing helped..
[www.youtube.com]
So i ordered linear slides and this is what i've done today. No plastic, only 2040 extrusion (left from other projects), some 20*20 aluminum tube, screws and so on.
[www.youtube.com]
|
Re: Tripteron Implementation December 10, 2016 03:48PM |
Registered: 7 years ago Posts: 143 |
Quote
leprud
Hello!
I'm also trying to buid tripteron.
At first i wanted it to be without any linear slides, only trapezoidal screws, but failed to mount arm on nuts, that it won't move, so i had a "leaning" sideways arm, as nuts "tickle" on screw. Of course used two nuts, different rubbers, screws, elongations, etc. Nothing helped..
[www.youtube.com]
So i ordered linear slides and this is what i've done today. No plastic, only 2040 extrusion (left from other projects), some 20*20 aluminum tube, screws and so on.
[www.youtube.com]
Very cool!! I worry a little about your joint stiffness, but it looks you're using self-aligning bearings in those effector housings, and bushings or thrust washers in the other joints. That could definitely work if the bolt holes are accurate enough and bolts clamped down. As you discovered, designing and building your own joints in a way that they rotate smoothly but retain their orientation under load is actually pretty hard!

Definitely keep us posted, happy to answer any questions about the orthogonal design if you have any.
|
Re: Tripteron Implementation December 10, 2016 07:11PM |
Registered: 11 years ago Posts: 979 |
Quote
leprud
Hello!
I'm also trying to buid tripteron.
At first i wanted it to be without any linear slides, only trapezoidal screws, but failed to mount arm on nuts, that it won't move, so i had a "leaning" sideways arm, as nuts "tickle" on screw. Of course used two nuts, different rubbers, screws, elongations, etc. Nothing helped..
[www.youtube.com]
So i ordered linear slides and this is what i've done today. No plastic, only 2040 extrusion (left from other projects), some 20*20 aluminum tube, screws and so on.
[www.youtube.com]
I had a similar problem with LISA Simpson. I ended up making a zero clearance extension to one side. Video linked below.
That said...screws will wobble and arm angle changes will effect your position on the screw making the kinematics problematic. I considered using screws for a Tripteron a few times but the recouping of the kinematics always turned me off along with my experiences with LISA. (LISA is fun but ultimately impractical.)
If you want to make a Tripteron without linear motion, there a few options but they all require more linkages between ground and the effector making it even harder to make rigid enough. That said... I am always up for discussing crazy ideas. I find they lead to interesting solutions.
ConceptFORGE
Wally, GUS Simpson, LISA Simpson, THOR Simpson, Sextupteron, CoreXZ
|
Re: Tripteron Implementation December 11, 2016 03:47AM |
Registered: 10 years ago Posts: 12 |
Quote
Apsu
Very cool!! I worry a little about your joint stiffness, but it looks you're using self-aligning bearings in those effector housings, and bushings or thrust washers in the other joints. That could definitely work if the bolt holes are accurate enough and bolts clamped down. As you discovered, designing and building your own joints in a way that they rotate smoothly but retain their orientation under load is actually pretty hard!
Definitely keep us posted, happy to answer any questions about the orthogonal design if you have any.
I don't worry about bolt holes, as even if thrust bearing+bolt are not aligned properly, they can move only in "right" direction - and we need our assembly to move freely that way. Anyway, i tried to clamp it very tight
Still thinking, if self-aligning bearings on effector is good solution, even they are REALLY stiff, they can move under stress conditions..
|
Re: Tripteron Implementation December 11, 2016 03:54AM |
Registered: 10 years ago Posts: 12 |
Of course i saw LISA (and other your cool ideas) and her problems..Quote
nicholas.seward
I had a similar problem with LISA Simpson. I ended up making a zero clearance extension to one side. Video linked below.
That said...screws will wobble and arm angle changes will effect your position on the screw making the kinematics problematic. I considered using screws for a Tripteron a few times but the recouping of the kinematics always turned me off along with my experiences with LISA. (LISA is fun but ultimately impractical.)
If you want to make a Tripteron without linear motion, there a few options but they all require more linkages between ground and the effector making it even harder to make rigid enough. That said... I am always up for discussing crazy ideas. I find they lead to interesting solutions.
I'm still thinkin of using "special" chain instead of arms, but can't find any technical data about it's backlash in sideways direction.
It's also hard to find this type of chain to test it myself


|
Re: Tripteron Implementation December 11, 2016 01:20PM |
Registered: 10 years ago Posts: 12 |
|
Re: Tripteron Implementation December 11, 2016 01:27PM |
Registered: 7 years ago Posts: 143 |
Quote
leprud
So, quickly put the belts on and gave it a test run.
Well, could be better..
[www.youtube.com]
Not a bad start! I'm sure you see what I see, which is the Z tower wobbling, just like it did in my build. If you brace that up it should improve the behavior quite a bit. Looking decent!
|
Re: Tripteron Implementation December 11, 2016 01:44PM |
Registered: 7 years ago Posts: 7 |
Quote
leprud
So, quickly put the belts on and gave it a test run.
Well, could be better..
[www.youtube.com]
Isn't it lacking an elbow joint on z arm? Looks like without that your workspace is limited to a cilinder around z tower.
Good job though, I can't wait for my linear rail to arrive to try a drop in adaptation for my Kossel.
|
Re: Tripteron Implementation December 11, 2016 01:47PM |
Registered: 7 years ago Posts: 143 |
Quote
kayrangandhi
Quote
leprud
So, quickly put the belts on and gave it a test run.
Well, could be better..
[www.youtube.com]
Isn't it lacking an elbow joint on z arm? Looks like without that your workspace is limited to a cilinder around z tower.
Good job though, I can't wait for my linear rail to arrive to try a drop in adaptation for my Kossel.
I see elbows on all three arms. Take a closer look.
|
Re: Tripteron Implementation December 11, 2016 01:49PM |
Registered: 7 years ago Posts: 7 |
Quote
Apsu
Quote
kayrangandhi
Quote
leprud
So, quickly put the belts on and gave it a test run.
Well, could be better..
[www.youtube.com]
Isn't it lacking an elbow joint on z arm? Looks like without that your workspace is limited to a cilinder around z tower.
Good job though, I can't wait for my linear rail to arrive to try a drop in adaptation for my Kossel.
I see elbows on all three arms. Take a closer look.
Indeed! My bad.
|
Re: Tripteron Implementation December 11, 2016 02:03PM |
Registered: 10 years ago Posts: 12 |
Oh yes! It shakes like it always wanted to make a "harlem shake"Quote
Apsu
Not a bad start! I'm sure you see what I see, which is the Z tower wobbling, just like it did in my build. If you brace that up it should improve the behavior quite a bit. Looking decent!
I hope more brackets will help me, as now only one bracket is supporting Z tower.
Also, need to rethink of joints, maybe loosening it will not give so much backlash as i thought.. For now, Z motor can't even move it down on full current
|
Re: Tripteron Implementation December 11, 2016 02:18PM |
Registered: 7 years ago Posts: 143 |
Quote
leprud
Oh yes! It shakes like it always wanted to make a "harlem shake"Quote
Apsu
Not a bad start! I'm sure you see what I see, which is the Z tower wobbling, just like it did in my build. If you brace that up it should improve the behavior quite a bit. Looking decent!
I hope more brackets will help me, as now only one bracket is supporting Z tower.
Also, need to rethink of joints, maybe loosening it will not give so much backlash as i thought.. For now, Z motor can't even move it down on full current
Yeah, it's definitely tricky to get good low-friction behavior without it being too loose and introducing lateral play. That's why after a dozen tries I ended up going with preloaded bearings so I could clamp on them without binding much. Also the single-shear arrangement you're using (links side by side) is weaker than a double-shear (fork/tongue like I used) arrangement and much harder to get right. Double-shear halves the stress on the bolt/joint and is inherently much more rigid, since the forces are centered. It's more work but if you're looking to redesign them anyway, that's the direction I would suggest!
|
Re: Tripteron Implementation December 11, 2016 02:22PM |
Registered: 10 years ago Posts: 12 |
|
Re: Tripteron Implementation December 13, 2016 01:08AM |
Registered: 7 years ago Posts: 143 |
Small update, my beams came so I got one arm assembly together for testing, seems to be pretty much ideal.
Here's a video of how smooth the rotation is under a decent preload: YouTube Link
And some pics:
Printing the rest of the arm brackets and then I'll get new shoulders/effector with matching tongue fixtures finished up. Should be assembled and moving again in a day or two. Hopefully printing not long after!
Here's a video of how smooth the rotation is under a decent preload: YouTube Link
And some pics:




Printing the rest of the arm brackets and then I'll get new shoulders/effector with matching tongue fixtures finished up. Should be assembled and moving again in a day or two. Hopefully printing not long after!
|
Re: Tripteron Implementation December 14, 2016 04:42AM |
Registered: 8 years ago Posts: 5,232 |
I just found another motivation for me than just curiosity to build an ortho-tripteron.
I think it's a good platform for a huge laser engraver. The focus of the laser allows a small amount of deflection in z-axis and the "bed" could be anything I want to engrave on.
DC42's new firmware allows to scan a height map of the surface, which would help ironing out any imperfections of it.
Edited 1 time(s). Last edit at 12/14/2016 04:43AM by o_lampe.
I think it's a good platform for a huge laser engraver. The focus of the laser allows a small amount of deflection in z-axis and the "bed" could be anything I want to engrave on.
DC42's new firmware allows to scan a height map of the surface, which would help ironing out any imperfections of it.
Edited 1 time(s). Last edit at 12/14/2016 04:43AM by o_lampe.
|
Re: Tripteron Implementation December 14, 2016 11:35AM |
Registered: 7 years ago Posts: 143 |
Quote
o_lampe
I just found another motivation for me than just curiosity to build an ortho-tripteron.
I think it's a good platform for a huge laser engraver. The focus of the laser allows a small amount of deflection in z-axis and the "bed" could be anything I want to engrave on.
DC42's new firmware allows to scan a height map of the surface, which would help ironing out any imperfections of it.
Cool, the more real Tripterons in the wild the better! Go for it, would love to see what you come up with.
|
Re: Tripteron Implementation December 15, 2016 03:40PM |
Registered: 7 years ago Posts: 143 |
Shoulder print is looking and behaving well. Going to proceed with the other two and draw up a 2nd pass effector


|
Re: Tripteron Implementation December 16, 2016 10:18AM |
Registered: 8 years ago Posts: 5,232 |



{kind=link}
{kind=link}
Sorry, only registered users may post in this forum.